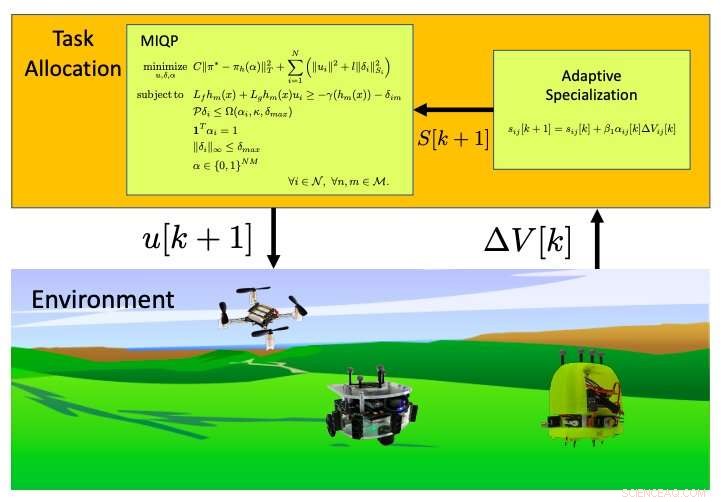
Une figure illustrant la boucle de rétroaction proposée entre le cadre de répartition des tâches, l'environnement, et la mise à jour de la spécialisation adaptative. L'efficacité des robots à chaque tâche est mesurée par ∆V [k], qui est passé à la loi de mise à jour de spécialisation adaptative. Une fois les nouveaux paramètres de spécialisation calculés, l'allocation des tâches MIQP est résolue et les entrées sont envoyées aux robots. Crédit :Emam et al.
Dans les années récentes, les robots sont devenus de plus en plus sophistiqués, par conséquent, ils sont maintenant capables d'accomplir une grande variété de tâches. Alors que certains robots sont conçus pour fonctionner individuellement, par exemple fournir une assistance de base à domicile, d'autres peuvent être plus efficaces lorsqu'ils sont déployés en équipes.
Lors des missions de recherche et sauvetage, par exemple après des catastrophes naturelles, les robots pourraient être plus efficaces en équipe, car ils pourraient livrer des fournitures ou rechercher des survivants plus rapidement, couvrant des régions géographiques plus vastes. Pour mener à bien les missions en équipe le plus efficacement possible, cependant, les robots devraient être capables de bien coopérer et de répartir efficacement différentes tâches entre eux.
Avec ça en tête, des chercheurs du Georgia Institute of Technology (Georgia Tech) ont récemment développé un cadre pour l'attribution adaptative des tâches au cours de missions qui doivent être effectuées par une équipe de robots. leur cadre, présenté dans un article pré-publié sur arXiv, peut assigner des tâches aux robots en fonction de leurs capacités et caractéristiques uniques.
« Les équipes de robots sont censées fonctionner dans des environnements dynamiques et cet article propose une règle mise à jour qui permet aux robots de savoir dans quelle mesure ils sont adaptés à chacune des différentes tâches auxquelles ils sont affectés à la volée, " Youssef A Emam, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore.
Le cadre développé par les chercheurs est basé sur une technique d'attribution de tâches pour des systèmes multi-robots hétérogènes qu'ils ont introduit dans un article précédent. Cette stratégie précédemment conçue implique l'utilisation d'un algorithme qui tient compte des différences dans les capacités individuelles des robots et attribue les tâches en conséquence. L'attribution et l'exécution de ces tâches ont lieu simultanément.
"Notre framework résout les problèmes d'optimisation en ligne, dire aux robots individuels comment hiérarchiser leurs contributions aux diverses tâches qu'ils doivent accomplir (c'est-à-dire, répartition des tâches), et comment le faire (c'est-à-dire exécution de la tâche), " dit Emam.
Dans leur étude, Emam et ses collègues se sont appuyés sur la stratégie de répartition des tâches qu'ils avaient précédemment développée, le rendant plus réactif aux changements de l'environnement des robots. Contrairement à sa version précédente, leur nouveau cadre ne nécessite pas un modèle explicite de l'environnement ou des capacités du robot qui sont inconnues. Au lieu, il considère principalement les progrès collectifs que l'équipe de robots a réalisés sur une mission donnée et les performances de chaque robot sur des tâches individuelles.
« Dans notre étude récente, nous avons développé une loi de rétroaction qui rend le cadre précédemment développé adaptatif aux perturbations environnementales, " expliqua Emam. " Cela signifie que même si le robot n'a pas une connaissance parfaite de son adéquation à chacune des tâches, il l'apprendra à la volée."
Les chercheurs ont évalué leur cadre dans une série de simulations et ont constaté qu'il obtenait des résultats très prometteurs. Dans ces expériences, leur approche a permis une répartition efficace des tâches entre les robots dans diverses conditions environnementales, même dans les cas où les capacités des robots individuels étaient inconnues avant leur déploiement.
À l'avenir, le cadre d'attribution et d'exécution des tâches développé par Emam et ses collègues pourrait améliorer la coopération entre les robots déployés en équipe, améliorer leur performance collective. Cela pourrait à terme faciliter la mobilisation à grande échelle de robots lors de missions de recherche et de sauvetage.
« Nous travaillons actuellement à étendre le cadre pour inclure les fonctionnalités de chaque robot (par exemple, les capteurs, actionneurs), afin que nous puissions modéliser les défaillances des fonctionnalités en ligne de manière plus explicite, " dit Emam. " De plus, un autre aspect que nous examinons est la répartition des calculs entre les robots (décentralisée)."
© 2020 Réseau Science X