Crédit :Berscheid, Meissner &Kröger.
Lorsque les êtres humains tendent la main pour saisir un objet donné, ils ont souvent besoin de repousser l'encombrement afin de l'isoler et de s'assurer qu'il y a suffisamment d'espace pour le ramasser. Même si les humains ne sont pas toujours pleinement conscients qu'ils le font, cette stratégie, connue sous le nom de "manipulation de pré-saisie, " leur permet de saisir plus efficacement les objets.
Dans les années récentes, plusieurs chercheurs ont tenté de reproduire des stratégies de manipulation humaine dans des robots, encore moins d'études se sont concentrées sur la manipulation de pré-saisie. Avec ça en tête, une équipe de chercheurs de l'Institut de technologie de Karlsruhe (KIT) a récemment développé un algorithme qui peut être utilisé pour entraîner des robots à la fois aux stratégies de préhension et de pré-saisie. Cette nouvelle approche a été présentée dans un article prépublié sur arXiv.
« Bien que saisir soit une tâche bien comprise en robotique, la manipulation ciblée de pré-saisie est toujours très difficile, " Lars Berscheid, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Cela rend très difficile pour les robots de saisir des objets en dehors du fouillis ou des espaces restreints pour le moment. Cependant, avec les récentes innovations en apprentissage machine et robotique, les robots peuvent apprendre à résoudre diverses tâches en interagissant avec son environnement. Dans cette étude, nous avons voulu appliquer une approche que nous avons présentée dans nos travaux antérieurs non seulement à la saisie, mais aussi à la manipulation de présaisie."

Crédit :Berscheid, Meissner &Kröger.
Lorsqu'un robot apprend à accomplir une certaine tâche, il doit essentiellement trouver comment résoudre un problème en maximisant ses récompenses. Dans leur étude, les chercheurs se sont concentrés sur une tâche qui impliquait de saisir des objets dans un bac rempli au hasard.
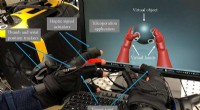
Le robot a été entraîné à saisir des objets pendant environ 80 heures, en utilisant l'entrée d'une caméra et la rétroaction de sa pince. Lorsqu'il a réussi à tenir un objet dans sa pince robotique, il a obtenu une récompense. L'algorithme développé par Berscheid et ses collègues va encore plus loin dans l'entraînement du robot, lui permettant d'acquérir également des stratégies de manipulation utiles pour la pré-saisie, comme se déplacer ou pousser.
"L'idée clé de notre travail était d'étendre les actions de préhension en introduisant des mouvements supplémentaires de déplacement ou de poussée, " a expliqué Berscheid. " Le robot peut alors décider quelle action appliquer dans différentes situations. Former des robots en réalité est très délicat :d'abord, ça prend beaucoup de temps, la formation elle-même doit donc être automatisée et auto-supervisée, et deuxièmement, beaucoup de choses inattendues peuvent se produire si le robot explore son environnement. Semblable à d'autres techniques d'apprentissage automatique, l'apprentissage du robot est toujours limité par sa consommation de données. En d'autres termes, notre travail est lié à deux questions de recherche très difficiles :comment un robot peut-il apprendre le plus rapidement possible et quelles tâches un robot peut-il apprendre en utilisant les informations découvertes ? »

Crédit :Berscheid, Meissner &Kröger.
Comme Berscheid l'explique, un robot peut apprendre plus efficacement s'il reçoit un retour direct après chaque action qu'il effectue, car cela résout le problème des récompenses rares. En d'autres termes, plus un robot reçoit de feedback (c'est-à-dire plus il reçoit de récompenses pour des actions réussies), plus vite et plus efficacement il apprend comment accomplir une tâche donnée.
"Cela semble facile, mais est parfois délicat à mettre en œuvre :Par exemple, comment définissez-vous la qualité d'une manipulation de pré-saisie?", A déclaré Berscheid.
L'approche proposée par les chercheurs est basée sur une étude précédente qui a examiné l'utilisation des différences dans les probabilités de saisie avant et après une action particulière, en se concentrant sur une petite zone autour de l'endroit où l'action est effectuée. Dans leur nouvelle étude, Berscheid et ses collègues ont également essayé de découvrir des actions qu'un robot devrait essayer d'apprendre le plus rapidement possible.