Configuration expérimentale démontrant des applications homme-machine. Crédit :S. Mondel, et al., L'Université de Melbourne
Un Internet tactile est potentiellement la prochaine phase de l'Internet des objets, dans lequel les humains peuvent toucher et interagir avec des objets distants ou virtuels tout en faisant l'expérience d'un retour haptique réaliste.
Une équipe de chercheurs dirigée par Elaine Wong à l'Université de Melbourne, Australie, a développé une méthode pour améliorer les expériences de retour haptique dans les applications homme-machine typiques de l'Internet tactile. Les chercheurs pensent que leur méthode peut être utilisée pour prévoir une rétroaction appropriée dans des applications allant des soins de santé électroniques aux jeux de réalité virtuelle.
Wong et ses collègues présenteront leur module proposé, qui utilise un réseau de neurones artificiels pour prévoir le matériau touché, à l'OFC (Optical Fiber Communication Conference and Exhibition), qui se tiendra du 8 au 12 mars 2020 au San Diego Convention Center, Californie, ETATS-UNIS.
Selon la dynamique de l'interaction, une application homme-machine optimale peut nécessiter un temps de réponse du réseau aussi court qu'une milliseconde.
"Ces temps de réponse imposent une limite à la distance qui peut être placée entre les humains et les machines, " dit Wong. " Par conséquent, Les solutions permettant de découpler cette distance du temps de réponse du réseau sont essentielles à la réalisation de l'Internet tactile."
Comme un pas vers cet objectif, l'équipe a formé un algorithme d'apprentissage par renforcement pour deviner le retour haptique approprié dans un système homme-machine avant que le retour correct ne soit connu. Le module, appelé Event-based Haptic SAmple Forecast (EHASAF), accélère le processus en fournissant une réponse tactile basée sur une prédiction probabiliste du matériau avec lequel l'utilisateur interagit.
"Pour faciliter les applications homme-machine sur les réseaux longue distance, nous nous appuyons sur l'intelligence artificielle pour pallier les effets d'une longue latence de propagation, " dit Sourav Mondal, un auteur sur le papier.
Une fois le matériau réel identifié, l'unité adapte et met à jour sa distribution de probabilité pour aider à choisir la rétroaction appropriée pour l'avenir.
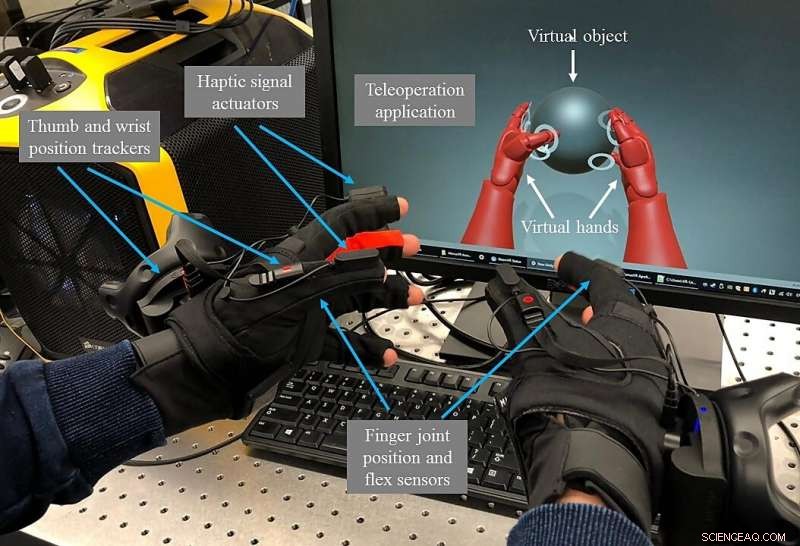
Le groupe a testé le module EHASAF avec une paire de gants de réalité virtuelle utilisés par un humain pour toucher une balle virtuelle. Les gants contiennent des capteurs sur les doigts et les poignets pour détecter les touchers et suivre les mouvements, forces et l'orientation de la main.
Selon le matériau que l'utilisateur choisit de toucher parmi les quatre options virtuelles proposées, le retour du gant doit varier. Par exemple, une boule en métal sera plus ferme qu'une boule en mousse. Lorsqu'un réseau de neurones détermine qu'un des doigts a touché le ballon, le module EHASAF commence à parcourir les options de rétroaction pour générer jusqu'à ce qu'il résolve le matériau réel de la balle choisie.
Actuellement, avec quatre matériaux, la précision de prédiction du module est d'environ 97%.
"Nous pensons qu'il est possible d'améliorer la précision des prédictions avec un plus grand nombre de matériaux, " dit Mondal. " Cependant, des modèles plus sophistiqués basés sur l'intelligence artificielle sont nécessaires pour y parvenir. »
"Des modèles de plus en plus sophistiqués avec des performances améliorées peuvent être développés sur la base de l'idée fondamentale de notre module EHSAF proposé, ", a déclaré Mondal.
Ces résultats et des recherches supplémentaires seront présentés sur place à l'OFC 2020.