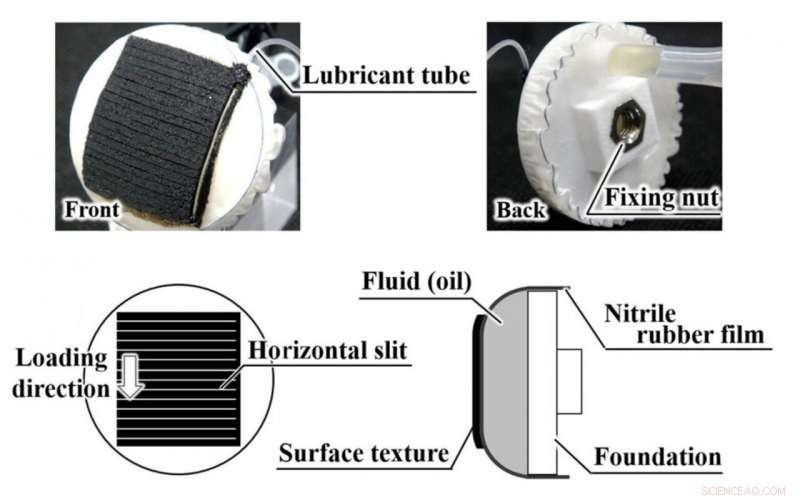
Il s'agit d'un bout de doigt fluide avec une texture de surface collée. Crédit :Université de Kanazawa
Les robots industriels sont maintenant largement utilisés et sont indispensables dans la construction automobile et dans d'autres domaines. Les mains de robot conventionnelles conviennent pour saisir des objets durs de forme fixe, alors qu'il n'est pas facile de saisir des objets compliqués ou de saisir délicatement des objets mous. Il faut aussi, dans diverses conditions, pour répondre aux caractéristiques physiques des objets telles que les caractéristiques de surface :sec, mouiller, etc.
Le bout du doigt à surface molle d'une main de robot est déformable et peut saisir assez facilement un objet de forme compliquée, puisque la zone de contact peut être agrandie par déformation de surface en réponse à la forme de l'objet. Le bout des doigts à surface molle est très efficace pour saisir des objets mous; même le tofu peut être saisi. Généralement, cependant, le frottement de surface du matériau mou est élevé, ce qui rend la libération plus difficile. Il est également difficile de libérer des objets aux positions souhaitées, surtout dans les cas où l'espace de travail est étroit.
Un groupe dirigé par le professeur Tetsuyou Watanabe de l'Université de Kanazawa a mené des recherches sur la technologie de contrôle pour saisir des objets du bout des doigts des mains de robots. Dans la présente étude, le groupe visait à développer un système de contrôle de friction. Le groupe a utilisé le bout des doigts souples d'une main de robot pour saisir des objets; la libération a été accomplie en appliquant (injectant) un lubrifiant. Dans cette étude, éthanol absolu (> 99,5%) a été utilisé comme lubrifiant, puisque l'éthanol est chimiquement sûr et facile à sécher, et puisque sa tension superficielle est faible.
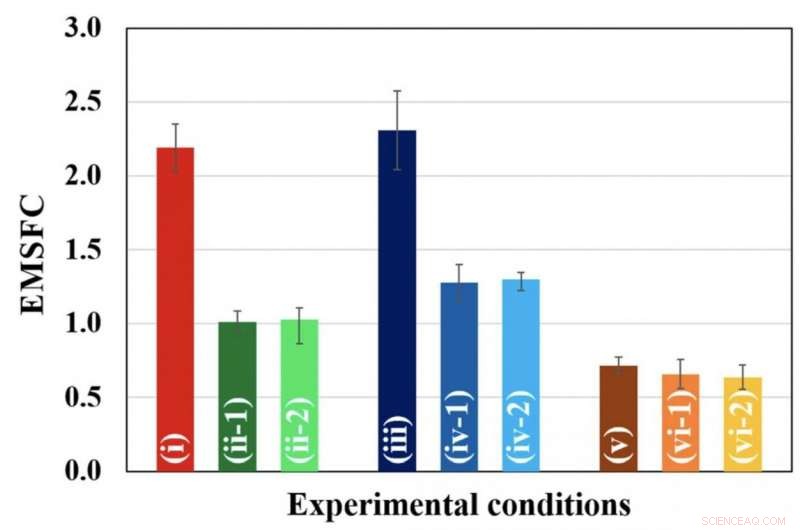
EMSFC dans diverses conditions expérimentales. Le matériau cible était le polypropylène. Un objet en polypropylène a été saisi par le bout des doigts fluide illustré à la figure 1, et le coefficient de frottement statique maximum équivalent (EMSFC)*2) a été mesuré pour révéler l'effet du lubrifiant. (i) sec :(ii-1) sec, lubrifiant injecté avant préhension :(ii-2) sec, lubrifiant injecté après préhension :(iii) mouillé à l'eau :(iv-1) mouillé à l'eau, lubrifiant injecté avant préhension :(iv-2) mouillé à l'eau, lubrifiant injecté après préhension :(v) huileux à l'huile de tronçonneuse :(vi-1) huileux à l'huile de tronçonneuse, lubrifiant injecté avant préhension :(vi-2) huileux à l'huile de tronçonneuse, lubrifiant injecté après préhension. L'effet du lubrifiant, éthanol absolu, a été vérifié dans des conditions sèches et humides. Crédit :Université de Kanazawa
Comme le montre la figure 1, un film de caoutchouc nitrile a été collé sur les côtés de la fondation du bout des doigts pour créer un espace pour le remplissage avec de l'huile de scie à chaîne pour faire un « bout de doigt fluide ». Ensuite, une "texture" de silicone a été liée pour enrober le film de caoutchouc ; le matériau de la "texture" était un mastic silicone avec des fentes, dont l'intervalle était de 1,5 mm, perpendiculaire à la direction de la charge. Les fentes ont été introduites pour plus de friction dans des conditions humides et pour l'étalement du lubrifiant. Avec ce bout de doigt fluide, des objets de divers matériaux utilisés pour les ustensiles de cuisine ont été saisis et il a été vérifié que, lors de l'application du lubrifiant, le frottement était en effet réduit (figure 2). Le frottement a été réduit dans des conditions sèches et humides, alors qu'un tel effet lubrifiant n'a pas été observé dans des conditions huileuses.
Prochain, une simulation de tâche d'emballage de boîte a été effectuée comme le montre la figure 3. Une boîte en papier a été saisie avec deux doigts fluides des deux côtés. La "texture" décrite ci-dessus a été liée à chaque bout de doigt fluide. La saisie stable a été confirmée en mettant un poids sur la boîte en papier. Après avoir enlevé le poids, du lubrifiant a été injecté aux deux bouts des doigts fluides, ce qui a provoqué un glissement vers le bas de la boîte en papier en un temps assez court (moins de 2,5 s), afin que la tâche d'emballage de la boîte en papier soit terminée (Figure 3). Comme montré ici, une "texture" de frottement élevé a été collée au bout du doigt fluide, et injecter un lubrifiant (ici, éthanol absolu) a réduit le frottement. Ainsi, la libération et le placement d'un objet à une position souhaitée ont été accomplis en contrôlant le frottement sans bouger le bout des doigts.
Dans cette étude, il a été vérifié que la saisie d'objets par le bout des doigts fluides à surface molle avec un frottement élevé était contrôlable en appliquant un lubrifiant approprié. Il est, cependant, nécessaire de faire plus d'expériences dans diverses conditions afin d'appliquer la technologie de contrôle actuelle aux environnements de fabrication. Néanmoins, cette étude devrait être un pas en avant pour réaliser l'automatisation du travail de, par exemple, saisir et relâcher des objets dans un espace étroit.
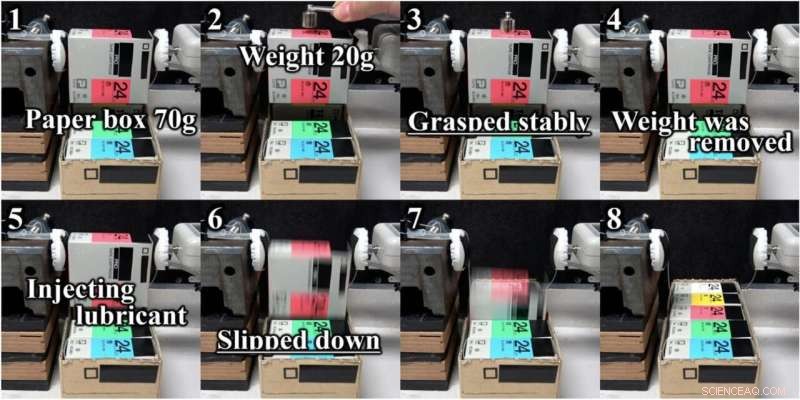
Il s'agit d'une simulation de tâche d'emballage de boîtes en papier. (1) Une boîte en papier (70g) a été saisie par deux doigts fluides des côtés gauche et droit, (2) Placer un poids de 20g sur la boîte en papier, (3) Confirmant la préhension stable, (4) Retrait du poids, (5) injection de lubrifiant, (6) La boîte en papier glisse vers le bas, (7) La boîte en papier se glissant dans le boîtier inférieur, (8) Achèvement de l'emballage de la boîte en papier. Crédit :Université de Kanazawa