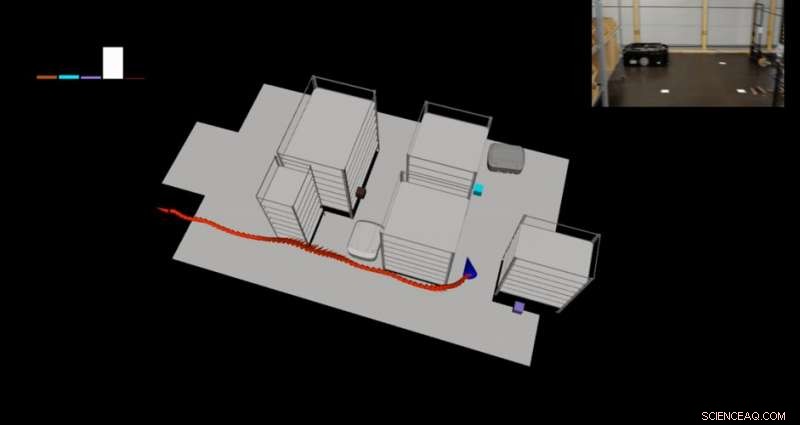
La trajectoire du travailleur humain dans la zone de test de l'entrepôt. Les données de localisation sont fournies par l'algorithme de localisation de Hololens. En haut à droite, la vue à la première personne du travailleur peut être vue. En haut à gauche se trouvent les probabilités du travailleur d'atteindre un objectif spécifique. Crédit :Petkovic et al.
La croissance rapide des entreprises de logistique a généré un besoin de systèmes d'entrepôt plus évolués et plus efficaces. Les progrès de la robotique pourraient aider à répondre à ces besoins en automatisant des tâches actuellement réalisées par des humains, accélérer considérablement le flux de travail.
Pour fonctionner de manière sûre et efficace, cependant, les assistants d'entrepôt robotisés devraient être capables de reconnaître les intentions de leurs opérateurs humains. Des chercheurs de l'Université de Zagreb et de l'Institut de technologie de Karlsruhe ont récemment développé un algorithme d'estimation de l'intention humaine basé sur les principes de la théorie de l'esprit (ToM). ToM est la capacité humaine à reconnaître l'intention, croyances, désirs, émotions, et les états mentaux chez d'autres humains.
"Notre recherche est née du projet européen Horizon 2020 SafeLog, qui vise à permettre l'entrée en toute sécurité des humains dans des entrepôts entièrement automatisés, où les robots mobiles transportent des racks, sans arrêter toute la flotte de robots, " David Puljiz, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Cela se fait grâce à l'utilisation d'un gilet de sécurité spécialement conçu et d'un dispositif AR pour guider et aider le travailleur à naviguer dans cet environnement."
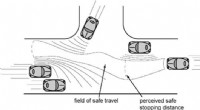
Pour renforcer la sécurité, le système de sécurité de l'entrepôt conçu par les chercheurs planifie la trajectoire d'un robot afin qu'elle n'entre pas en conflit avec celle des travailleurs humains. Pour que ça marche, il doit savoir où va l'opérateur humain, surtout s'il ne se dirige pas vers un endroit préalablement convenu.
Puljiz et ses collègues ont observé le mouvement de travailleurs humains individuels dans des environnements d'entrepôt et les ont validés par rapport à leurs emplacements de but, en utilisant une approche appelée planification généralisée basée sur le diagramme de Voronoï. Ces observations ont ensuite été introduites dans un modèle de Markov caché, qui peut estimer les intentions d'un travailleur en ligne alors qu'il navigue dans des environnements changeants.
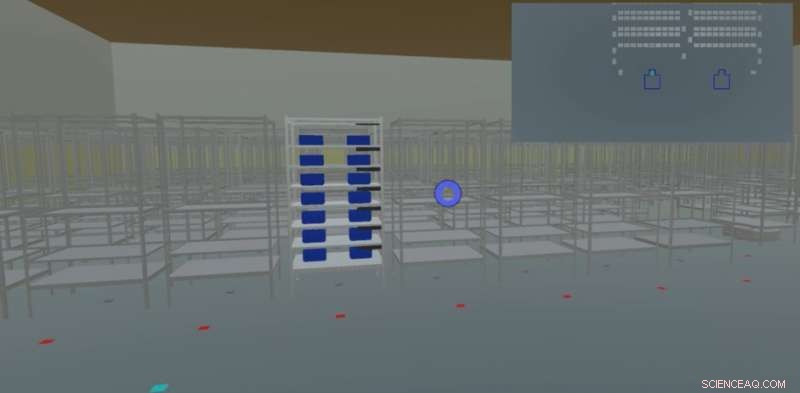
La vue à la première personne dans l'environnement VR, utilisé pour tester l'algorithme dans des scénarios à grande échelle. En haut à gauche, une vue à vol d'oiseau de la zone autour du travailleur peut être vue, y compris les robots mobiles. Crédit :Puljiz et al.
"L'algorithme d'estimation de l'intention humaine basé sur la ToM pour les entrepôts robotisés flexibles est basé sur la validation de mouvement du modèle Markov caché, " Tomislav Petkovic, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. « Nous observons le mouvement du travailleur et le validons par rapport aux emplacements des objectifs en utilisant une planification de chemin généralisée basée sur le diagramme de Voronoï. Ces observations sont ensuite traitées par le cadre du modèle de Markov caché, qui estime les intentions des travailleurs en ligne et est capable de gérer des environnements changeants. Le laboratoire LAMOR de l'Université de Zagreb a développé le backend de l'algorithme :la validation du mouvement et l'estimation de l'objectif. »
Pour évaluer l'efficacité du modèle, IPR Lab de l'Institut de technologie de Karlsruhe a réalisé des expériences d'estimation d'intention dans un petit environnement de test d'entrepôt, en utilisant des lunettes Microsoft Hololens AR. Les chercheurs ont effectué d'autres évaluations dans des entrepôts virtuels à plus grande échelle, utilisant la technologie VR. Ils ont découvert que leur cadre pouvait estimer efficacement les intentions des employés d'entrepôt, avec une précision remarquable.
"Je pense que l'aspect le plus significatif de notre étude est que les appareils AR peuvent être utilisés pour plus que le divertissement ou le marketing et peuvent en fait être utiles dans les environnements industriels, " a déclaré Puljiz. " Le domaine de la recherche est plutôt nouveau et il existe de nombreuses possibilités dans ce domaine. "
À l'avenir, l'algorithme d'estimation de l'intention humaine en temps réel développé par Puljiz et ses collègues pourrait augmenter la sécurité et l'efficacité des systèmes robotiques basés sur les entrepôts. Par exemple, cela pourrait aider au développement de robots plus réactifs capables d'estimer les intentions des opérateurs humains qui les entourent, adaptant et planifiant leurs itinéraires en conséquence.
« Dans les travaux futurs, nous pourrions étendre l'algorithme aux espaces 3D et suivre la direction du regard en 3D pour déterminer, par exemple, si le travailleur a l'intention de se tromper d'objet ou s'il craint qu'un robot ne s'approche, " a déclaré Puljiz. " Il y a plein d'autres possibilités, y compris les intégrations de suivi manuel."
© 2018 Réseau Science X