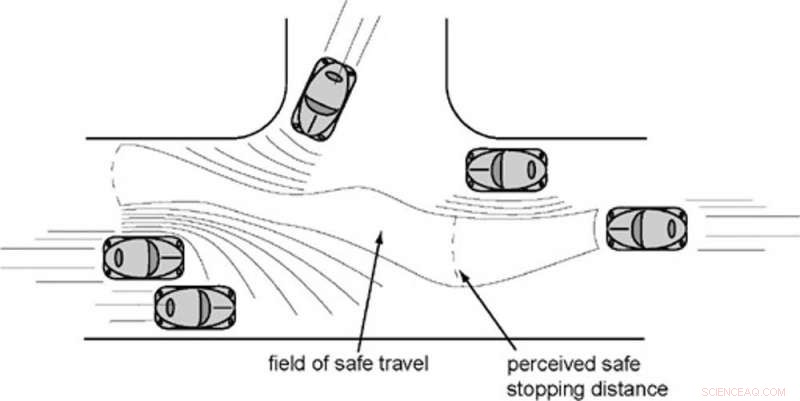
Le conducteur de la voiture de droite juge un chemin sûr à travers les obstacles en fonction de ses mouvements et des distances d'arrêt perçues. Crédit :Adapté de Gibson et Crooks par Steven Lehar
En 1938, quand il y avait à peu près un dixième du nombre de voitures sur les routes américaines comme il y en a aujourd'hui, un brillant psychologue et un ingénieur pragmatique ont uni leurs forces pour écrire l'un des ouvrages les plus influents jamais publiés sur la conduite automobile. Le meurtre d'un piéton par une voiture autonome en Arizona montre à quel point leur travail est toujours pertinent aujourd'hui, en particulier en ce qui concerne la sécurité des véhicules automatisés et autonomes.
James Gibson, le psychologue en question, et l'ingénieur Laurence Crooks, son partenaire, évalué le contrôle d'un conducteur d'un véhicule de deux manières. La première consistait à mesurer ce qu'ils appelaient la « zone d'arrêt minimale, " la distance qu'il faudrait pour s'arrêter après que le conducteur a appuyé sur les freins. La seconde était de regarder la perception psychologique du conducteur des dangers possibles autour du véhicule, qu'ils appelaient le « domaine du voyage en toute sécurité ». Si quelqu'un conduisait de telle sorte que tous les dangers potentiels se trouvaient en dehors de la plage nécessaire pour arrêter la voiture, cette personne conduisait prudemment. Conduite dangereuse, d'autre part, impliquait d'aller si vite ou de diriger si erratiquement que la voiture ne pouvait pas s'arrêter avant de potentiellement heurter les dangers identifiés.
Cependant, ce domaine de la sécurité des déplacements n'est pas le même pour les voitures autonomes. Ils perçoivent le monde qui les entoure à l'aide de lasers, radar, GPS et autres capteurs, en plus de leurs caméras embarquées. Leurs perceptions peuvent donc être très différentes de celles présentées aux yeux humains. À la fois, leurs temps de réponse actifs peuvent être beaucoup plus rapides - voire parfois excessivement lents, dans les cas où ils nécessitent une intervention humaine.
J'ai beaucoup écrit sur la nature de l'interaction humaine avec la technologie, en particulier concernant la prochaine vague d'automobiles automatisées. Il est clair pour moi que, si les personnes et les machines ne conduisent qu'en fonction de leurs capacités de perception et de réponse respectives – et significativement différentes, alors les conflits et les collisions seront presque inévitables. Pour partager la route en toute sécurité, chaque partie devra comprendre l'autre beaucoup plus intimement qu'elle ne le fait maintenant.
Jeu de mouvement et de vue
Pour les conducteurs humains, la vision est reine. Mais ce que voient les conducteurs dépend de la façon dont ils déplacent la voiture :freinage, l'accélération et la direction modifient la position de la voiture et donc la vue du conducteur. Gibson a compris que cette interdépendance mutuelle de perception et d'action signifiait que face à une situation particulière sur la route, les gens s'attendent à ce que les autres se comportent de manière spécifique. Par exemple, une personne qui regarde une voiture arriver à un panneau d'arrêt s'attendrait à ce que le conducteur arrête la voiture; regardez autour de vous pour le trafic venant en sens inverse, piétons, cyclistes et autres obstacles; et ne procéder que lorsque la côte est dégagée.
Un panneau d'arrêt existe clairement pour les conducteurs humains. Cela leur donne l'occasion de regarder attentivement autour d'eux sans être distraits par d'autres aspects de la conduite, comme la direction. Mais un véhicule autonome peut scanner tout son environnement en une fraction de seconde. Il ne doit pas nécessairement s'arrêter - ou même ralentir - pour naviguer à l'intersection en toute sécurité. Mais une voiture autonome qui franchit un panneau d'arrêt sans même s'arrêter sera considérée comme alarmante, et même dangereux, aux humains proches, parce qu'ils supposent que les règles humaines s'appliquent toujours.
Ce que les machines peuvent comprendre
Voici un autre exemple :pensez aux voitures qui passent d'une rue latérale à une artère très fréquentée. Les gens savent que le contact visuel avec un autre conducteur peut être une méthode efficace de communication entre eux. Dans une section divisée, un conducteur peut demander la permission d'intervenir et l'autre conducteur peut reconnaître que oui, elle cédera pour faire de la place. Comment exactement les gens devraient-ils avoir cette interaction avec une voiture autonome ? C'est quelque chose qui n'a pas encore été établi.
Piétons, cyclistes, motards, les automobilistes et les camionneurs sont tous capables de comprendre ce que les autres conducteurs humains sont susceptibles de faire – et d'exprimer leurs propres intentions à une autre personne de manière appropriée.
Un véhicule automatisé est une tout autre affaire. Il ne saura pas grand-chose ou rien du « puis-je ? » "Oui, « OK » les types d'interaction informelle auxquels les gens s'engagent tous les jours, et sera bloqué uniquement avec les règles spécifiques qui lui ont été fournies. Étant donné que peu d'algorithmes peuvent comprendre ces hypothèses humaines implicites, ils se comporteront différemment de ce à quoi les gens s'attendent. Certaines de ces différences peuvent sembler subtiles, mais certaines transgressions, comme exécuter le panneau d'arrêt, pourrait causer des blessures ou même la mort.
Quoi de plus, les voitures sans conducteur peuvent être efficacement aveuglées si leurs divers systèmes sensoriels se bloquent, dysfonctionnement ou fournir des informations contradictoires. Dans l'accident mortel de 2016 d'une Tesla en mode « pilote automatique », par exemple, une partie du problème pourrait avoir été un conflit entre certains capteurs qui auraient pu détecter un semi-remorque de l'autre côté de la route et d'autres qui ne l'ont probablement pas fait parce qu'il était rétroéclairé ou trop haut par rapport au sol. Ces échecs peuvent être assez différents des défauts que les gens attendent de leurs semblables.
Comme pour toutes les nouvelles technologies, il y aura des accidents et des problèmes – et sur les routes, cela entraînera presque inévitablement des blessures et la mort. Mais ce type de problème n'est pas propre aux voitures autonomes. Plutôt, c'est peut-être inhérent à toute situation où les humains et les systèmes automatisés partagent l'espace.
Cet article a été initialement publié sur The Conversation. Lire l'article original.