Crédit :Chand Gudi et al.
Des chercheurs du Laboratoire de recherche sur l'innovation et l'entreprise (The Magic Lab) de l'Université de technologie de Sydney ont proposé une nouvelle architecture robotique appelée Fog Robotics (FR). Leur approche, décrit dans un article prépublié sur arXiv, exploite les atouts du fog computing, une structure informatique décentralisée dans laquelle les ressources et les données sont placées entre leur source et le cloud.
Dans les années à venir, les robots sont susceptibles d'être largement adoptés dans une variété de contextes, y compris les maisons, établissements de santé, et plusieurs industries. La communication active est un facteur clé d'une interaction homme-robot efficace et les chercheurs du monde entier tentent donc de concevoir de nouvelles stratégies qui pourraient améliorer la façon dont les robots communiquent.
La robotique du cloud (CR) permet aux robots d'effectuer des calculs étendus dans le cloud en partageant des cartes, images, Les données, Activités, puissance de traitement et d'autres ressources en ligne. Cependant, en raison de ses vastes demandes de données et de trafic, CR entraîne de graves problèmes de latence, en particulier dans les interactions robot-humain.
« L'idée de la robotique du brouillard m'est venue à l'esprit après avoir constaté une latence élevée dans la communication d'un robot, tant dans ses réponses que dans l'atteinte de son objectif, " Siva Leela Krishna Chand Gudi, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Nous nous sommes demandé ce qui pourrait arriver dans un avenir proche, quand les robots serviront partout, car ce décalage est susceptible d'augmenter. En héritant des fonctionnalités du fog computing et en faisant de la robotique cloud notre compagnon, nous avons introduit et inventé le terme robotique de brouillard, première à la conférence IROS 2017. »
L'objectif principal de l'étude menée par Gudi et ses collègues était de fournir des données robustes, interactions homme-robot fluides et efficaces avec une faible latence. Les chercheurs voulaient également permettre aux robots de communiquer et de collaborer avec les humains tout en effectuant simultanément des tâches, partager leurs résultats ou leurs activités au sein de la même famille de robots. Cela transformerait finalement les robots en partenaires qui comprennent les besoins des humains avec lesquels ils interagissent, répondre rapidement et efficacement.
Crédit :Chand Gudi et al.
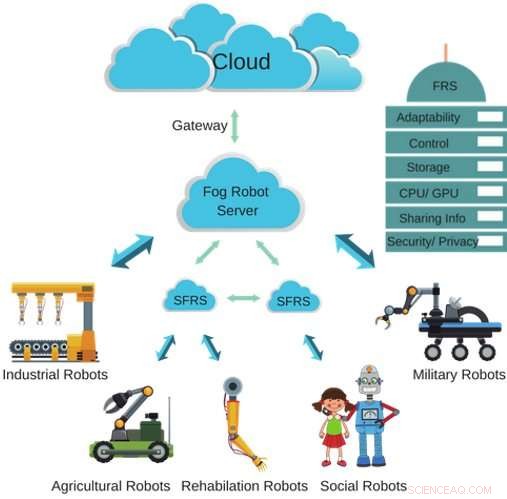
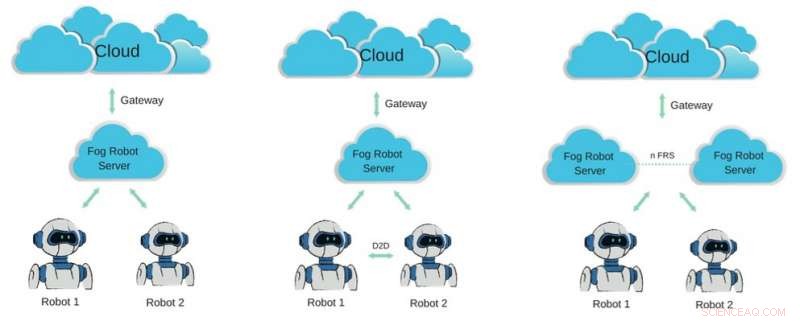
Pour résoudre les problèmes liés à la RC, les chercheurs ont proposé et défini une nouvelle architecture robotique baptisée Fog Robotics (FR), composé de stockage, fonctions de mise en réseau, et l'informatique décentralisée plus proche des robots. FR a trois composants principaux :le serveur de robot sub Fog, le serveur robot de brume, et le nuage.
Un robot envoie une demande d'information au système FR, demander initialement des transferts au serveur de robot de brouillard secondaire. Si ce serveur peut traiter efficacement la requête, il transmet les informations demandées au robot; s'il ne peut pas, il sollicite l'assistance du serveur du robot de brouillard. Si ce serveur est également incapable de traiter la demande, il demande de l'aide au cloud, qui résout généralement la demande et transmet les informations au robot.
Les avantages de cette approche incluent un taux de réponse rapide, faible latence, capacités de calcul améliorées, consommation d'énergie réduite, matériel moins cher, et moins de problèmes de sécurité ou de confidentialité. En d'autres termes, FR pourrait conduire à des interactions homme-robot robustes et plus rapides, tout en améliorant la durée de vie de la batterie du robot.
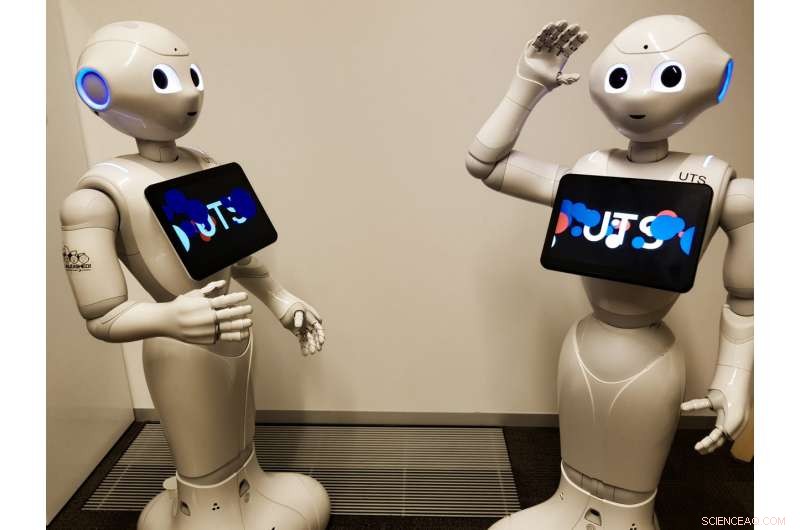
« Sur la base du délai moyen reçu par un robot social Pepper et une configuration de FRS/Cloud, nous avons considéré une valeur de latence, " a déclaré Gudi. " Nous avons ensuite examiné nos méthodologies actuelles sur une plate-forme de simulation, évaluer leurs effets potentiels lorsque le nombre de robots augmente. Nous avons prouvé que FR offre une faible latence et pourrait jouer un rôle essentiel à l'avenir, devenir un ajout à CR."
Dans une série d'évaluations initiales, FR a obtenu des taux de réponse beaucoup plus rapides que les approches CR. Les chercheurs pensent qu'il pourrait être utilisé indépendamment ou intégré à la CR, réduire la charge sur le cloud et améliorer la qualité de service (QoS).
Crédit :Chand Gudi et al.
"Nous, les humains, cherchons l'aide des autres chaque fois que nous avons besoin d'informations, mais les robots sont limités aux tâches pour lesquelles ils sont préprogrammés, " explique Gudi. " FR permet aussi à un robot de partager ses données avec un autre robot. "
Pour mieux expliquer ce point, Gudi a donné un exemple de la façon dont plusieurs robots pourraient aider les humains à l'intérieur d'un aéroport. Dans le scénario qu'il décrit, un voyageur demanderait à un robot l'emplacement de sa porte d'embarquement. Le robot guiderait le voyageur jusqu'à l'escalier roulant, puis confierait la tâche à un deuxième robot, qui attendrait à l'autre bout de l'escalator.
Pour le reconnaître à l'approche de l'autre extrémité de l'escalator, ce deuxième robot nécessiterait des informations sur le nom de la personne, identité, genre et à quoi ils ressemblent. Dans cette situation, FR permettrait à ces deux robots de collaborer sur la tâche et de communiquer entre eux, échangeant rapidement les informations nécessaires à l'accomplissement de la tâche.
"De la même manière, Les techniques FR pourraient être appliquées dans les universités, métros, robots industriels, Et la liste continue, atteindre différents domaines de la robotique, " dit Gudi. " En fin de compte, FR conduit à une interaction homme-robot robuste avec une faible latence, tout en sécurisant les données personnelles en les sauvegardant sur le serveur du robot de brouillard."
Les chercheurs ont effectué un certain nombre d'analyses supplémentaires, qu'ils publieront bientôt en ligne. Ils prévoient également de tester l'efficacité de FR à RoboCup à Sydney, où plusieurs robots s'affronteront dans la nature.
© 2018 Réseau Science X