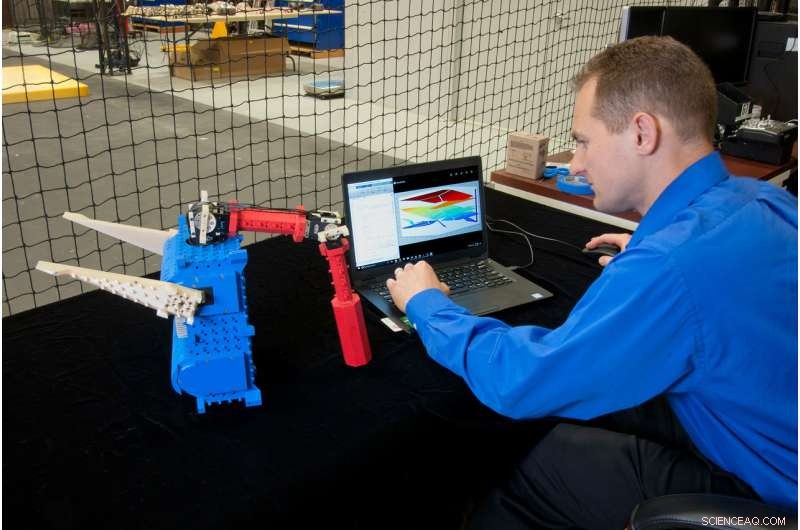
Dr Chad Kessens, un roboticien au US Army Research Laboratory à Aberdeen Proving Ground, Maryland., propose des idées innovantes pour les futurs robots militaires. Crédit :Le laboratoire de recherche de l'armée
Des scientifiques du U.S. Army Research Laboratory et du Johns Hopkins University Applied Physics Laboratory ont développé un logiciel pour garantir que si un robot tombe, il peut se relever, ce qui signifie que les futurs robots militaires dépendront moins de leurs maîtres soldats.
Sur la base des commentaires des soldats lors d'un cours de formation de l'armée, Le chercheur de l'ARL, le Dr Chad Kessens, a commencé à développer un logiciel pour analyser si un robot donné pouvait se « remettre sur pied » à partir de n'importe quelle orientation renversée.
"Un soldat m'a dit qu'il appréciait tellement son robot, il est sorti de son véhicule pour secourir le robot alors qu'il n'arrivait pas à le retourner, " a déclaré Kessens. "C'est une histoire que je ne veux plus jamais entendre."
Des chercheurs de la Navy PMS-408 (Missions expéditionnaires) et de son bras technique, la division de la technologie de neutralisation des explosifs et munitions d'Indian Head, se mettre d'accord. Ils se sont associés à JHU/APL et au maître d'œuvre, Télécommande Northrop Grumman, développer le système robotique avancé de neutralisation des explosifs et munitions, ou AEODRS, une nouvelle famille de systèmes robotiques EOD présentant une architecture modulaire de systèmes ouverts. Une plate-forme sac à dos légère, qui est l'incrément un du programme, devrait entrer en production plus tard cette année. Une exigence critique du programme est que les robots doivent être capables de se redresser automatiquement.
"Ces robots existent pour garder les soldats hors de danger, " a déclaré Reed Young, Responsable du programme Robotique et Autonomie chez JHU/APL. "L'auto-redressement est une capacité critique qui ne fera que favoriser cet objectif."
Pour évaluer la capacité du système AEODRS à se redresser, JHU/APL s'est associé à ARL pour tirer parti du logiciel développé par Kessens. L'équipe a pu étendre sa capacité aux robots avec un plus grand nombre d'articulations (ou degrés de liberté) grâce à l'expertise du chercheur JHU/APL Galen Mullins dans les techniques d'échantillonnage adaptatif.
"L'analyse sur laquelle je travaille porte sur toutes les géométries et orientations possibles dans lesquelles le robot pourrait se trouver, " a déclaré Kessens. " Le problème est que chaque joint supplémentaire ajoute une dimension à l'espace de recherche. Il est donc important de rechercher aux bons endroits les états stables et les transitions. Autrement, la recherche pourrait prendre trop de temps."

Les chercheurs explorent de nouvelles techniques à l'aide de la plateforme Advanced Explosive Ordnance Disposal Robotic System Increment 1. Crédit :Le laboratoire de recherche de l'armée
Kessens a déclaré que le travail de Mullins était ce qui a permis à l'analyse de fonctionner efficacement pour analyser des systèmes à plus haut degré de liberté. Alors que le travail de Kessens détermine ce qu'il faut rechercher et comment, Mullins sait où chercher."
« Cette analyse a été rendue possible grâce à notre nouvel outil de planification contradictoire de la gamme, ou RAPT, un framework logiciel pour tester des systèmes autonomes et robotiques, " a déclaré Mullins. " Nous avons initialement développé le logiciel pour les véhicules sous-marins, mais quand Chad a expliqué son approche du problème de l'auto-redressement, J'ai tout de suite vu comment ces technologies pouvaient fonctionner ensemble."
Il a déclaré que la clé de ce logiciel est un algorithme d'échantillonnage adaptatif qui recherche les transitions.
« Pour ce travail, nous recherchions des états où le robot pouvait passer d'une configuration stable à une configuration instable, faisant ainsi basculer le robot, " a expliqué Mullins. " Mes techniques ont été capables de prédire efficacement où ces transitions pourraient être afin que nous puissions rechercher efficacement l'espace. "
Finalement, l'équipe a pu évaluer les huit degrés de liberté des systèmes AEODRS et a déterminé qu'il peut se redresser sur un terrain plat, quel que soit l'état initial dans lequel il se trouve. L'analyse génère également des plans de mouvement montrant comment le robot peut se réorienter. Les conclusions de l'équipe peuvent être consultées dans « Evaluating Robot Self-Righting Capabilities using Adaptive Sampling, " publié dans IEEE Lettres Robotique et Automatisation en août.
Au-delà de l'évaluation d'un robot spécifique, Kessens considère que le cadre d'analyse est important pour la capacité de l'armée à comparer les robots de différents fournisseurs et à sélectionner le meilleur pour l'achat.
"L'armée et la marine veulent des robots capables de se redresser, mais nous travaillons toujours pour comprendre et évaluer ce que cela signifie, " Kessens a dit. " L'égoïsme dans quelles conditions ? Nous avons développé une analyse métrique pour évaluer la capacité d'un robot à se redresser sur un sol plan en pente, et nous pourrions même l'utiliser comme un outil pour améliorer la conception des robots. Notre prochaine étape consiste à déterminer de quoi un robot est capable sur un terrain accidenté."