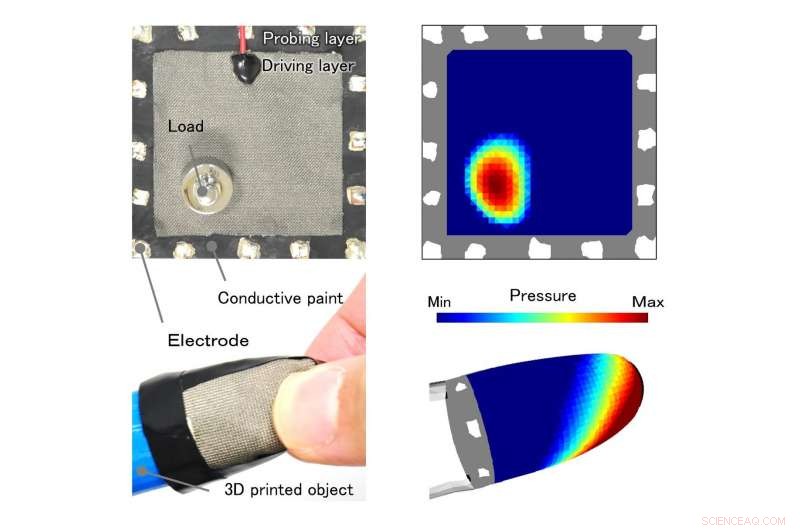
Fig. 1. Imagerie tactile utilisant des conducteurs universels. Crédit :Université d'Osaka
Toucher, ou la détection tactile, est fondamentalement important pour une gamme d'applications réelles, de la robotique à la médecine chirurgicale en passant par les sciences du sport. Les capteurs tactiles sont modelés sur le sens biologique du toucher et peuvent aider les chercheurs à comprendre la perception et le mouvement humains. Des chercheurs de l'Université d'Osaka ont maintenant développé une nouvelle approche de la mesure de la distribution de pression à l'aide de la technologie d'imagerie tactile.
La pression est l'une des principales caractéristiques du toucher, et l'imagerie tactile peut être utilisée pour mesurer les distributions de pression ou de contrainte sur un objet d'intérêt. L'approche actuelle la plus courante de l'imagerie tactile implique l'utilisation d'un réseau de capteurs composés de matériaux sensibles à la pression. Cependant, de tels réseaux nécessitent des processus de fabrication complexes et imposent des limites à la conception des capteurs, d'où la nécessité d'une nouvelle méthode, maintenant décrit dans un article de Transactions IEEE sur l'électronique industrielle .
"La pression entre deux conducteurs est directement liée à la résistance électrique de contact entre eux, " déclare Osamu Oshiro de l'Université d'Osaka. " Nous avons utilisé cette relation pour développer un capteur composé d'une paire de conducteurs couplés électromécaniquement, où un conducteur avait une fonction d'entraînement et l'autre assurait la fonction de sonde. Ce capteur n'a pas besoin de matériaux sensibles à la pression et est plus simple à fabriquer."
Cette stratégie a permis le développement d'un capteur tactile universel pour la mesure de la distribution de la pression de contact à l'aide de matériaux conducteurs simples tels que la peinture au carbone. Le concept de conception a combiné l'innovation dans la technologie mécatronique, qui a permis le développement d'un capteur souple à base de conducteurs conventionnels reliés à des électrodes, avec une approche basée sur la tomographie pour déterminer la distribution de la pression à travers les conducteurs couplés.
La méthode proposée s'est améliorée par rapport aux précédentes techniques de détection tactile basées sur la tomographie d'impédance électrique pour fournir des capteurs avec une précision de position élevée, sensibilité et portée réglables, et un processus de fabrication relativement simple. « Les capteurs peuvent être réalisés à l'aide de divers matériaux conducteurs, y compris les tissus conducteurs et les peintures, " dit l'auteur principal Shunsuke Yoshimoto. " Des capteurs flexibles de type feuille ont été fabriqués, ainsi que des capteurs en forme de doigt produits en enduisant des structures imprimées en 3D avec une peinture conductrice, pour illustrer d'éventuelles applications pratiques."
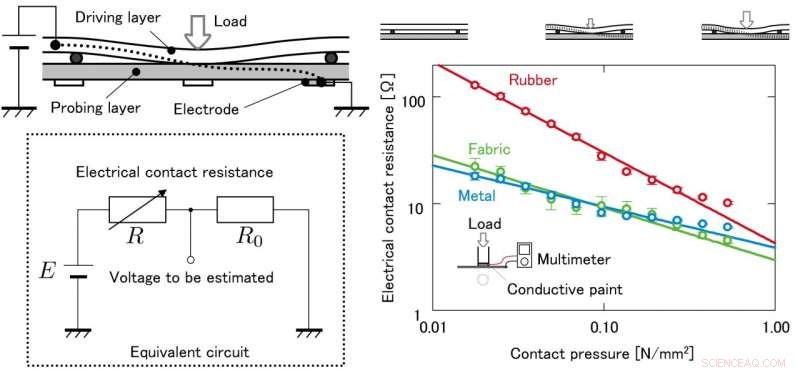
Fig. 2. Principe du capteur et illustration de la relation entre la résistance électrique de contact et la pression de contact. Crédit :Université d'Osaka
La facilité de réglage de la sensibilité et de la plage de détection et la précision de l'estimation de la pression signifient que cette approche d'imagerie tactile devrait permettre un contrôle avancé des robots polyvalents. "Ces capteurs devraient être applicables dans des domaines tels que le fonctionnement à distance des appareils et l'automatisation industrielle, " déclare le co-auteur Yoshihiro Kuroda.
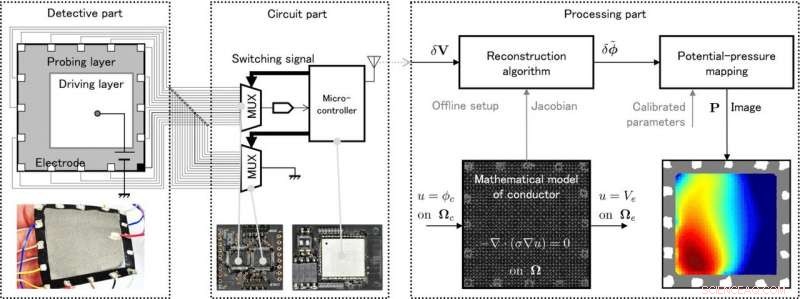
Fig. 3. Vue d'ensemble des principales sections du système de détection. Crédit :Université d'Osaka