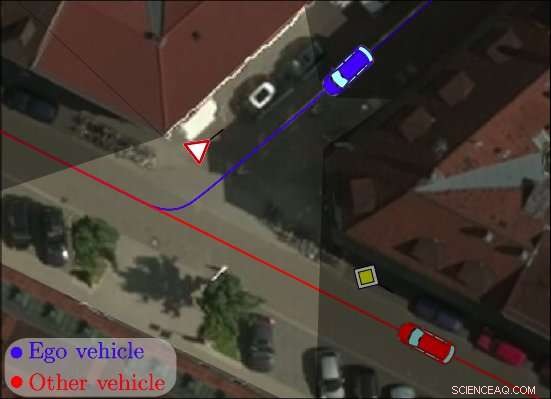
Un scénario d'intersection exemplaire mettant en évidence un cas d'utilisation de l'approche proposée. Le véhicule de l'ego, représenté en bleu tout au long de ce document, se dirige vers une intersection à laquelle il doit céder. Le véhicule a une visibilité limitée et un véhicule en intersection s'approche de la région occluse. Le planificateur du véhicule doit tenir compte du fait qu'un véhicule pourrait s'approcher et réduire adéquatement sa vitesse. Crédit :Tas &Stiller.
Des chercheurs du Centre de recherche FZI pour les technologies de l'information ont développé une nouvelle méthode qui pourrait améliorer la planification du mouvement des véhicules autonomes dans des environnements incertains ou dans des conditions de visibilité limitée. Leur papier, prépublié sur arXiv, décrit une technique pour éviter les collisions dans le pire des cas d'évolution d'un scénario donné.
« La conduite automatisée en milieu urbain et dans des conditions difficiles est à la fois un défi et reste à la pointe de la recherche, ", ont écrit les chercheurs dans leur article. "Des conditions météorologiques et lumineuses défavorables entraînent une mauvaise qualité de la perception en introduisant des incertitudes plus élevées et des champs récepteurs limités."
Les défis décrits par les chercheurs sont peut-être encore plus pertinents en milieu urbain, où des événements inattendus rendent plus difficile la prédiction de l'issue d'une situation. Pour faire face à ces difficultés, des études antérieures ont tenté de développer des systèmes de perception de pointe pour les véhicules automatisés.
Néanmoins, même le plus avancé de ces systèmes, équipé de capteurs et de technologies de pointe, ont souvent du mal à gérer l'incertitude, réduisant ainsi simplement le risque de collisions. Pour résoudre ce problème, les chercheurs du FZI se sont concentrés sur la planification du mouvement dans un environnement incertain avec des occlusions.
"Dans cet article, nous avons analysé les incertitudes auxquelles un véhicule automatisé est soumis, ", ont expliqué les chercheurs. "Nous avons étudié différentes situations de circulation difficiles pour un véhicule avec un champ réceptif limité."
Après avoir étudié les conditions dans lesquelles un planificateur de mouvement doit prendre en compte les véhicules venant de régions non visibles, les chercheurs ont conçu une approche pour détecter rapidement les comportements non conformes. Leur approche imite quelque peu la façon dont les conducteurs humains abordent généralement les intersections, conduire avec plus de prudence et à vitesse réduite.
"Nous présentons une méthode pour rester sans collision pour le pire des cas d'évolution de la scène donnée, ", ont écrit les chercheurs. "Nous définissons des critères qui mesurent les marges disponibles pour une collision tout en tenant compte de la visibilité et des interactions et, par conséquent, intégrons les conditions qui appliquent ces critères dans un planificateur de mouvement basé sur l'optimisation."
Les chercheurs ont évalué leur méthode dans un environnement de simulation en boucle fermée et ont constaté qu'elle se généralisait bien dans plusieurs scénarios urbains différents. Leur démarche est désormais intégrée dans un véhicule automatisé, appelé BERTHAONE.
« Nos futurs travaux porteront sur des scénarios plus complexes, où une multitude d'itinéraires et d'options de manœuvre telles que les changements de voie sont disponibles, ", ont écrit les chercheurs.
© 2018 Réseau Science X