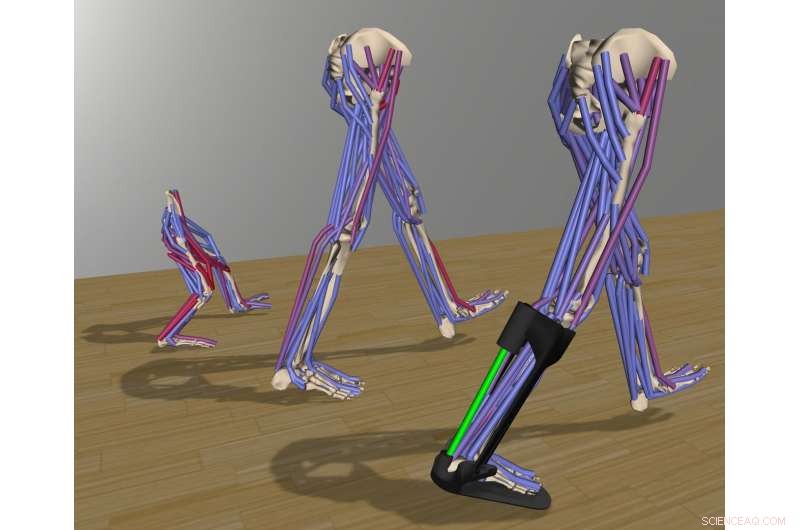
Le mouvement est fondamental à la vie humaine et animale, émergeant par l'interaction de neurones complexes, musclé, et les systèmes squelettiques. OpenSim est un logiciel open source qui réunit des modèles et des méthodes de pointe issus de la biologie, neurosciences, mécanique, robotique, et l'informatique pour créer des simulations de mouvement rapides et précises basées sur la physique. OpenSim complète les expériences en calculant les forces musculaires et d'autres grandeurs difficiles à mesurer, et permet la prédiction de mouvements tels que la locomotion bipède chez les ancêtres humains et les adaptations neuromusculaires aux exosquelettes ou aux chirurgies orthopédiques. Crédit :Seth et al.
Un simulateur de mouvement open source qui a déjà permis de résoudre des problèmes en médecine, paléontologie, et la locomotion animale a été élargie et améliorée, selon une nouvelle publication dans la revue en libre accès Biologie computationnelle PLOS . Les logiciels, appelé OpenSim, a été développé par une équipe de l'Université de Stanford, dirigé par les premiers auteurs Ajay Seth, Jennifer Hicks, et Thomas Uchida, avec des contributions d'utilisateurs du monde entier. Le nouveau document passe en revue la large gamme d'applications du logiciel et décrit les améliorations qui peuvent augmenter encore son utilité.
Les principaux défis de la création de mouvements "in silico" incluent la formulation des équations mathématiques sous-jacentes et la garantie de la précision de la solution lors du calcul de variables difficiles à mesurer expérimentalement, tels que la consommation métabolique des muscles individuels et l'étirement et le recul des tendons pendant le mouvement. Les modèles basés sur la physique permettent de prédire de nouveaux mouvements, à la fois adaptatif et inadapté, comme une rotation excessive de la hanche en réponse à une faiblesse musculaire des jambes. OpenSim combine des méthodes issues de la biologie, neurosciences, mécanique, et la robotique pour relever ces défis et créer des simulations de mouvement rapides et précises.
OpenSim a déjà été utilisé pour déterminer si Australopithecus afarensis avait une force de préhension suffisante pour fabriquer certains outils, basé sur des découvertes d'os fossilisés; développer des stratégies pour prévenir les blessures à la cheville pendant la performance athlétique; et l'optimisation d'un dispositif robotique portable pour les longs sauts. Des applications supplémentaires incluent la prédiction des schémas de locomotion d'espèces éteintes et la planification d'une chirurgie d'allongement des tendons pour les enfants atteints de paralysie cérébrale.
Les améliorations récentes incluent l'ajout de modèles plus précis de la dynamique musculaire, cinématique articulaire, et appareils fonctionnels, qui aidera dans les études de réhabilitation; la possibilité de créer des études personnalisées en combinant les outils existants de nouvelles manières ; des outils pour importer des données de capture de mouvement afin de tester des simulations par rapport à des expériences ; et des outils de visualisation modernes pour créer des animations perspicaces de mouvement.
"Le logiciel est comme un couteau suisse pour le scientifique du mouvement, " ont déclaré les auteurs principaux. " Il permet aux chercheurs sans expertise particulière en biomécanique d'effectuer des simulations puissantes et précises pour tester des hypothèses, visualiser les solutions aux problèmes, et communiquer des idées. Parce qu'il intègre des décennies de recherche sur la façon dont les humains et les autres animaux se déplacent, et est constamment augmenté et enrichi par la communauté d'utilisateurs de tant de domaines différents, OpenSim peut accélérer les découvertes dans n'importe quel domaine dans lequel le mouvement biologique joue un rôle."