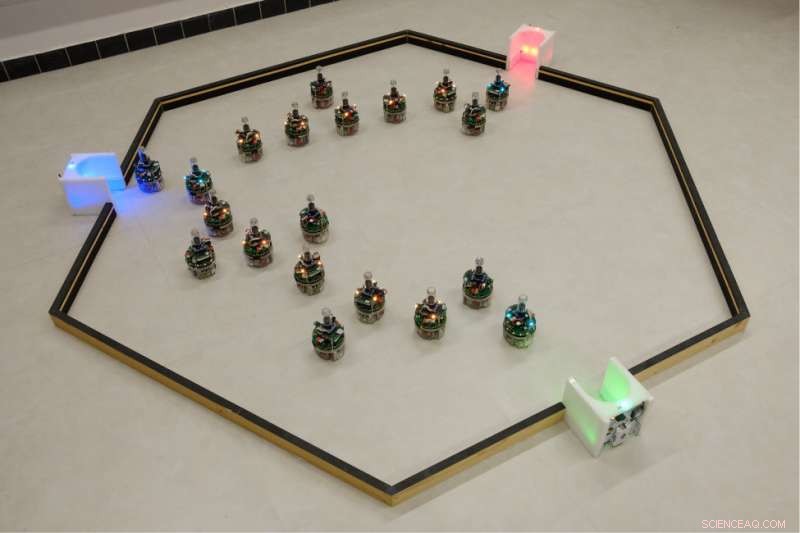
TS-Swarm dans son arène avec trois stands. Crédit :Garattoni et Birattari, Sci. Robot. 3, eaat0430 (2018)
Les robots pourraient-ils bientôt aider les équipes de secours à sauver les survivants d'une catastrophe naturelle ? Une telle mission nécessiterait que les robots soient capables de déterminer, par eux-même, quelles tâches effectuer et dans quel ordre les effectuer ; par exemple, il ne sert à rien d'essayer de sortir une victime des décombres si les décombres n'ont pas encore été déblayés. Actuellement, les ingénieurs sont chargés de programmer la séquence d'actions. Mais cela pourrait bientôt changer !
Mauro Birattari et Lorenzo Garattoni, chercheurs du laboratoire IRIDIA (Brussels School of Engineering, Université Libre de Bruxelles), ont récemment montré que les robots sont capables de décider collectivement dans quel ordre ils doivent accomplir leurs tâches. Les résultats de leurs recherches sont publiés dans Robotique scientifique ce mercredi, 18 juillet.
Les chercheurs du laboratoire IRIDIA ont basé leur étude sur la robotique en essaim, une branche de la robotique qui s'inspire du comportement collectif et organisé des animaux sociaux (comme les fourmis) afin de créer des groupes de robots dotés d'une intelligence artificielle. Les robots sont actuellement capables de communiquer et de se coordonner pour prendre des décisions et effectuer des tâches simples, comme déplacer un objet ou choisir l'un des deux chemins. Pour leurs dernières recherches, Mauro Birattari et Lorenzo Garattoni sont allés encore plus loin en termes de complexité :ils ont créé un essaim de robots capables d'effectuer une séquence de trois actions, sans connaître le bon ordre à l'avance. En pratique, les robots devaient se déplacer vers trois points différents dans l'espace, où ils devaient effectuer une tâche simple. Ce n'est qu'une fois les tâches terminées que les robots apprendraient si l'ordre était correct. Afin de résoudre ce problème, certains robots forment progressivement une chaîne entre les trois points de l'espace, que les autres utilisent comme guide pour tester les différentes combinaisons possibles en suivant les instructions des robots qui composent la chaîne (voir photo). Finalement, ils déterminent la séquence correcte en travaillant ensemble.