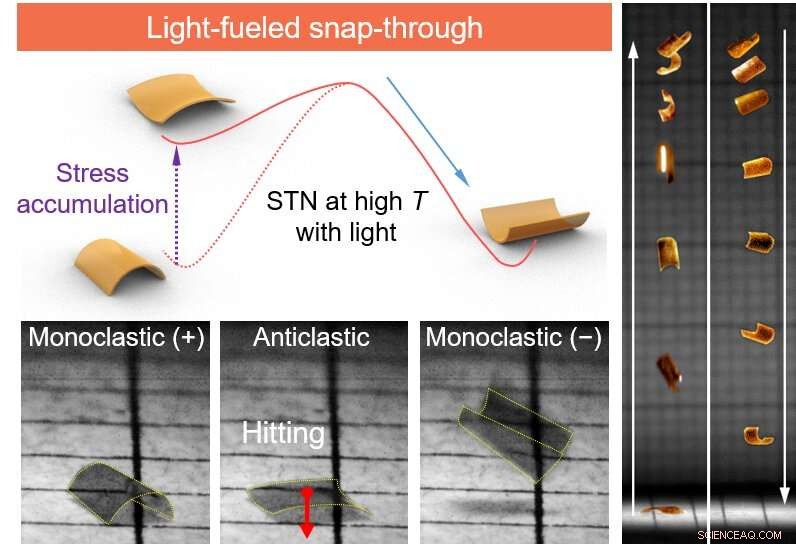
La structure bistable photo-induite permet au polymère cristallin liquide photoactif de réaliser un saut inspiré par snap-through. L'accumulation et la libération efficaces d'énergie photo-induite sont induites par la géométrie nématique super torsadée à 270° des molécules photoactives. Crédit :Université Inha
Le mouvement de saut est couramment observé dans la nature, y compris pour les mammifères, les insectes et les autres créatures terrestres; ce mouvement fluide vise une mobilité rapide, une heure d'arrivée plus rapide à destination sur de grands obstacles et un terrain accidenté. Les propriétés qualitatives du saut telles que la direction et la hauteur sont régulées par de simples fractions d'énergie potentielle et cinétique. En outre, un organisme peut choisir de répéter ses mouvements de saut selon son libre arbitre.
Pour mettre en œuvre un type similaire de comportement de saut dans les systèmes robotiques, il doit y avoir des conceptions sur mesure qui génèrent un transfert d'énergie instantané vers un substrat avec suffisamment d'énergie accumulée. La plupart des robots sauteurs actuels sur le terrain s'adaptent en donnant des coups de pied ou en poussant les substrats avec leurs jambes; celui-ci est généralement alimenté par des actionneurs motorisés ou des systèmes alimentés par batterie. Cependant, ces systèmes ajoutent un poids indésirable aux robots sauteurs et sont également difficiles à fixer sur un corps miniaturisé.
Un polymère cristallin liquide photoactif est capable de sauter un mouvement car la réponse photomécanique anisotrope de la machine moléculaire photoactive permet au polymère cristallin liquide d'accumuler et de libérer efficacement l'énergie photo-induite. La machine moléculaire photoactive, une fraction azobenzène, est aligné avec des molécules de cristaux liquides qui fournissent une contraction photo-induite directionnelle à partir de la photoisomérisation de l'azobenzène. La géométrie moléculaire nématique super torsadée à 270° en haut et en bas du polymère cristallin liquide photoactif induit un état bistable non isométrique sous irradiation de lumière actinique avec chauffage simultané. La structure bistable est connue pour accumuler de l'énergie en dessous de la barrière énergétique afin de se déformer entre deux structures stables. Au cours du processus de déformation, l'énergie accumulée commence à dépasser la barrière énergétique et se poursuit jusqu'à une libération instantanée, le soi-disant 'snap-through.' La libération d'énergie instantanée dans le polymère cristallin liquide photoactif génère le mouvement de saut par impact avec le substrat. Remarquablement, la hauteur de saut maximale atteint 15,5 longueurs de corps avec la vitesse instantanée maximale de 880 BL s -1 .
Un défi formidable pour un robot sauteur est le saut continu à la demande. Contrairement aux robots sauteurs motorisés, il est difficile de mettre en œuvre un saut continu ou directionnel pour un robot sauteur à corps monolithique car l'angle entre le robot et la source d'actionnement change en permanence. L'irradiation lumineuse bidirectionnelle permet au polymère cristallin liquide photoactif de sauter en continu de deux manières différentes :le saut photomécanique basé sur les coups et les coups de pied. Quelle que soit la direction d'atterrissage ou la courbure du robot mou, l'irradiation lumineuse à la demande du haut ou du bas permet des mouvements de saut dans les robots mous.
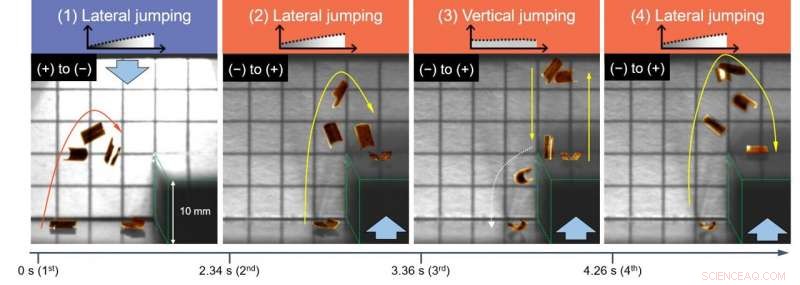
Le voyage guidé du polymère cristallin liquide photoactif par une lumière à motifs (un du haut et un autre du bas) pour une arrivée à destination en quelques secondes. Crédit :Université Inha
En outre, le saut photomécanique peut être guidé en générant un gradient d'intensité du faisceau. Le gradient d'intensité lumineuse brise la symétrie de la photoisomérisation dans un polymère cristallin liquide photoactif monolithique qui génère une directionnalité de l'énergie cinétique. En combinant une irradiation lumineuse bidirectionnelle avec un gradient d'intensité du faisceau, le polymère cristal liquide photoactif miniaturisé peut arriver à destination, même surmonter de gros obstacles.
Cette stratégie sans précédent fournira des informations sur la maniabilité du saut sans contact dans les robots mous miniaturisés.