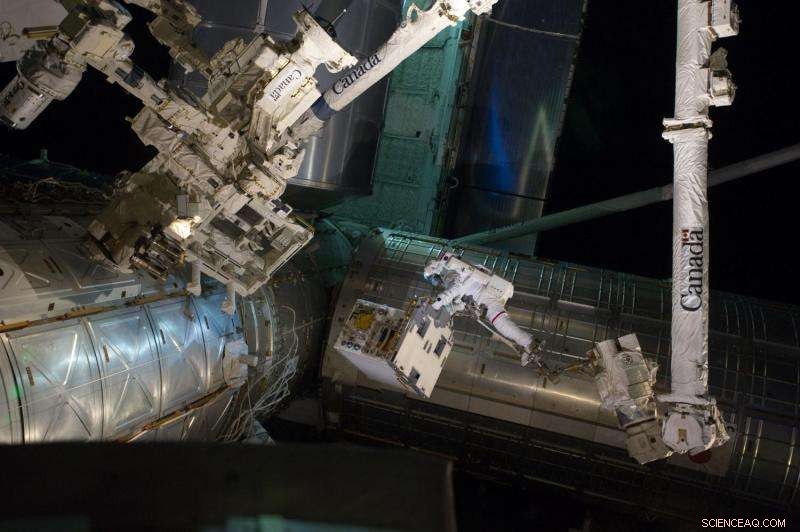
Sortie dans l'espace de l'astronaute Mike Fossum pour la charge utile de la mission de ravitaillement robotique le 12 juillet 2011. Crédit :NASA
La Station spatiale internationale sert de laboratoire d'essai et de démonstration en orbite pour les expériences scientifiques à effectuer à l'intérieur et à l'extérieur de la station spatiale. Les expériences sont intrinsèquement transitoires avec des cycles de vie typiques d'environ un à cinq ans. Une fois leurs objectifs de test atteints, ils sont supprimés pour faire place à de nouvelles expériences.
Le 19 février, une expérience de la NASA - un module de test appelé Raven - a été lancée avec succès sur SpaceX-10/Dragon et installée à l'extérieur de la station, où il testera les technologies de pilotage automatique pour les engins spatiaux. Alors que la charge utile Raven prenait son perchoir sur la station, une autre création de la division des projets d'entretien des satellites (SSPD) - la charge utile de la mission de ravitaillement robotique (RRM), défunt. A bord du coffre Dragon dans lequel est arrivé Raven, RRM est revenu sur Terre le 19 mars où il est rentré dans l'atmosphère. Bien que les deux charges utiles aient été et soient essentielles à l'avancement de l'entretien des satellites, après que RRM a atteint son but et atteint ses objectifs, il était temps pour RRM de quitter la station et de faire place à de nouvelles expériences.
RRM a établi un solide héritage en démontrant les capacités de service par satellite et le fait que le service en orbite est technologiquement prêt pour la mise en œuvre. RRM a été lancé en juillet 2011 à bord du dernier vol de la navette spatiale et a été la dernière charge utile à être retirée de la soute de la navette par un astronaute. Il a ensuite été monté à l'extérieur sur un transporteur logistique express construit au Goddard Space Flight Center de la NASA à Greenbelt, Maryland. RRM a démontré et testé les outils, technologies et techniques nécessaires au ravitaillement et à la réparation robotiques des satellites dans l'espace qui n'étaient pas conçus pour être entretenus.
La mission de ravitaillement robotique était un pont essentiel entre l'entretien habité effectué dans les missions d'entretien Hubble et l'entretien robotique qui sera démontré dans la prochaine mission Restore-L, " dit Ben Reed, directeur de division adjoint pour SSPD. « Notre équipe a travaillé très dur pour développer la suite d'outils et d'expériences RRM et est extrêmement heureuse de voir ce qu'ils ont accompli. Nous sommes impatients d'appliquer les leçons apprises de RRM à la mission Restore-L ainsi qu'aux futurs efforts de maintenance.
L'année était 2010 lorsque la planification de RRM a commencé. La quatrième mission d'entretien du télescope spatial Hubble venait de se terminer. La navette spatiale était au crépuscule de sa carrière, retraite prévue en 2011. Les centaines d'ingénieurs de Goddard qui avaient soutenu l'entretien de Hubble ne savaient pas ce que serait un avenir sans navette. Une équipe, dirigé par le "père du service" Frank Cepollina, a commencé à réfléchir à la façon de continuer à entretenir sans navette. Sans temps à perdre, L'équipe de Cepollina a déterminé que l'avenir de l'entretien reposerait sur la robotique et que le bras robotique de la station spatiale était le meilleur mécanisme pour tester et développer des techniques d'entretien robotique. Dix-huit mois plus tard, extrêmement rapide pour un projet de cette complexité, RRM était dans la soute de la navette spatiale Atlantis, prêt à lancer et à démontrer au monde que l'entretien robotique avait atteint sa maturité.
"La station spatiale est en orbite et possède déjà un robot, " a déclaré Frank Cepollina, l'ancien directeur associé de la SSPD. "La station spatiale a été conçue sur mesure pour RRM et a parfaitement fonctionné comme banc d'essai pour l'entretien."
La charge utile RRM de la taille d'une machine à laver abritait quatre outils uniques qui ont été utilisés par le robot canadien « Dextre » à deux bras de la station pour accomplir le travail précis, tâches complexes nécessaires au ravitaillement d'un satellite. Ces tâches comprenaient la coupe et le décollement des couvertures thermiques, dévisser plusieurs bouchons, accéder aux vannes et transférer un carburant satellite simulé. En janvier 2013, avec ce transfert de fluide dans l'espace, RRM a confirmé que la technologie robotique actuelle pourrait ravitailler une vanne de carburant satellite à triple étanchéité, transfert de 1,7 litre d'éthanol.
Dans des lancements séparés en 2013 et 2014, deux nouveaux tableaux de bord et un outil ont été envoyés à la station spatiale dans le cadre de la "Phase 2" du RRM. Les groupes de travail ont en outre démontré les activités vitales pour l'entretien des satellites en vol libre. De la même manière, le nouvel outil, le Robot Invertébré Posable d'Inspection Visuelle, ou VIPIR, présenté une inspection de pointe à courte et moyenne portée à l'aide d'un articulable, Outil d'endoscope "en forme de serpent".
A travers ces deux phases et plusieurs jours d'opérations, l'équipe RRM s'est soudée et a toujours performé sous pression. Ensemble, ils ont créé une charge utile et accompli une mission essentielle à l'avenir de l'entretien des satellites. Actuellement, ils développent et travaillent pour exécuter une troisième phase de RRM, qui continuera à faire progresser la technologie nécessaire au ravitaillement robotique. Le RRM 3 se concentrera spécifiquement sur l'entretien des interfaces de fluide cryogénique et de gaz xénon qui soutiendront les futures missions scientifiques à mesure que les humains étendront leur exploration plus loin dans notre système solaire.
"La station spatiale était une merveilleuse installation pour tester nos technologies, et nous savons que le départ de RRM laissera place à une autre belle expérience, " a déclaré Jill McGuire, Chef de projet RRM. "Nous sommes fiers de ce que nous avons accompli avec RRM, et sont ravis de contribuer aux prochaines étapes de l'activation de l'entretien des satellites robotiques. »