Le robot ASIMO de Honda. Voir plus photos de robots . Photo gracieuseté de Honda Motor Co., Ltd.
Le robot ASIMO de Honda. Voir plus photos de robots . Photo gracieuseté de Honda Motor Co., Ltd. Vous voulez un robot pour cuisiner votre dîner, fais tes devoirs, nettoie ta maison, ou faire vos courses ? Les robots font déjà beaucoup de travaux que nous, les humains, ne voulons pas faire, ne peut pas faire, ou ne peuvent tout simplement pas faire aussi bien que nos homologues robotiques. Dans les usines du monde entier, des bras de robot désincarnés assemblent des voitures, déposer délicatement les bonbons dans leurs boîtes, et faire toutes sortes de travaux fastidieux. Il existe même une poignée de robots sur le marché dont le seul travail est d'aspirer le sol ou de tondre votre pelouse.
Galerie d'images de robots
Beaucoup d'entre nous ont grandi en regardant des robots à la télévision et au cinéma :il y avait Rosie, la femme de ménage robot des Jetsons; Données, le membre d'équipage Android sur "Star Trek:The Next Generation"; et bien sûr, C3PO de "Star Wars". Les robots créés aujourd'hui ne sont pas tout à fait du domaine de la Data ou du C3PO, mais il y a eu des progrès incroyables dans leur technologie. Les ingénieurs de Honda ont été occupés à créer le ASIMO robot depuis plus de 20 ans . Dans cet article, nous découvrirons ce qui fait d'ASIMO le robot humanoïde le plus avancé à ce jour.
La Honda Motor Company a développé ASIMO, Qui veut dire Étape avancée dans la mobilité innovante , et est le robot humanoïde le plus avancé au monde. Selon le site Web de l'ASIMO, ASIMO est le premier robot humanoïde au monde capable de marcher de façon autonome et monter les escaliers .
En plus de la capacité d'ASIMO à marcher comme nous, ça peut aussi comprendre les gestes préprogrammés et les commandes vocales , reconnaître les voix et les visages et interface avec les cartes de communication IC . ASIMO a des bras et des mains pour pouvoir faire des choses comme allumer des interrupteurs, portes ouvertes, porter des objets, et poussez des chariots.
Plutôt que de construire un robot qui serait un autre jouet, Honda voulait créer un robot qui serait un assistant pour les gens -- un robot pour aider dans la maison, aider les personnes âgées, ou aider une personne confinée à un fauteuil roulant ou à un lit. ASIMO mesure 4 pieds 3 pouces (1,3 mètre) de haut, ce qui est juste la bonne hauteur pour regarder dans les yeux avec quelqu'un assis sur une chaise. Cela permet à ASIMO de faire le travail pour lequel il a été créé sans être trop gros et menaçant. Souvent désigné comme ressemblant à un « enfant portant une combinaison spatiale, " L'apparence amicale et la taille non menaçante d'ASIMO conviennent parfaitement aux objectifs que Honda avait en tête lors de sa création.
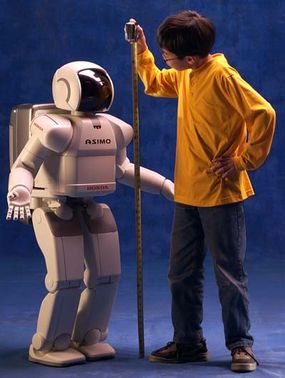 ASIMO mesure seulement 4 pieds 3 pouces Photo gracieuseté de Honda Motor Co., Ltd.
ASIMO mesure seulement 4 pieds 3 pouces Photo gracieuseté de Honda Motor Co., Ltd. ASIMO pourrait également faire des travaux trop dangereux pour les humains à faire, comme aller dans des zones dangereuses, désarmer les bombes, ou lutter contre les incendies.
Je ne peux pas être trop prudentIl a été rapporté que parce que la marche d'ASIMO est si étrangement humaine, Les ingénieurs de Honda se sont sentis obligés de visiter le Vatican juste pour s'assurer qu'il était acceptable de construire une machine qui ressemblait tellement à un humain. (Le Vatican pensait que tout allait bien.)
Contenu
 La physiologie d'ASIMO est développée pour imiter la physiologie humaine. Photo gracieuseté de Honda Motor Co., Ltd.
La physiologie d'ASIMO est développée pour imiter la physiologie humaine. Photo gracieuseté de Honda Motor Co., Ltd. Les chercheurs de Honda ont commencé par étudier les pattes des insectes, mammifères, et le mouvement d'un alpiniste avec des prothèses de jambes pour mieux comprendre la physiologie et tout ce qui se passe lorsque nous marchons, en particulier dans les articulations. Par exemple, le fait que nous déplacer notre poids l'utilisation de notre corps et surtout de nos bras pour l'équilibre était très importante pour obtenir le bon mécanisme de marche d'ASIMO. Le fait que nous ayons les orteils cette aide à notre équilibre a également été prise en compte :ASIMO a en fait des projections douces sur ses pieds qui jouent un rôle similaire à celui que jouent nos orteils lorsque nous marchons. Cette matière douce aussi absorbe les chocs sur les articulations, tout comme nos tissus mous lorsque nous marchons.
ASIMO a hanche, le genou, et les articulations des pieds . Les robots ont des articulations que les chercheurs appellent " degrés de liberté ." Un seul degré de liberté permet de se déplacer à droite et à gauche ou de haut en bas. ASIMO a 34 degrés de liberté répartis sur différents points de son corps afin de lui permettre de se déplacer librement. Il y a trois degrés de liberté dans le cou d'ASIMO, sept sur chaque bras et six sur chaque jambe. Le nombre de degrés de liberté nécessaires aux jambes d'ASIMO a été déterminé en mesurant le mouvement des articulations humaines en marchant sur un terrain plat, monter les escaliers et courir.
ASIMO dispose également d'un capteur de vitesse et un gyroscope capteur monté sur son corps. Ils effectuent les tâches de :
Ces capteurs fonctionnent de la même manière que nos oreilles internes dans la manière dont ils maintiennent l'équilibre et l'orientation.
ASIMO a également capteurs de surface au sol dans ses pieds et six capteurs à ultrasons dans sa partie médiane. Ces capteurs améliorent la capacité d'ASIMO à interagir avec son environnement en détectant des objets autour d'ASIMO et en comparant les informations recueillies avec des cartes de la zone stockées dans la mémoire d'ASIMO.
Pour accomplir le travail que font nos muscles et notre peau pour détecter la puissance musculaire, pression et angles articulaires, ASIMO a à la fois capteurs d'angle d'articulation et un capteur de force à six axes .
 Photo gracieuseté de Honda Motor Co., Ltd.
Photo gracieuseté de Honda Motor Co., Ltd. À moins que vous ne connaissiez bien la robotique, vous ne comprenez peut-être pas pleinement l'incroyable étape, c'est qu'ASIMO marche comme nous. La partie la plus importante de la marche d'ASIMO est la capacités de tournage . Plutôt que d'avoir à s'arrêter et à mélanger, arrêter et mélanger, et s'arrêter et se déplacer dans une nouvelle direction, ASIMO se penche et tourne en douceur comme un humain. ASIMO peut également ajuster lui-même ses pas en cas de trébuchement, est poussé, ou rencontre quelque chose qui altère la marche normale.
Pour y parvenir, Les ingénieurs d'ASIMO ont dû trouver un moyen de travailler avec le forces d'inertie créé en marchant. Par exemple, la gravité terrestre crée une force, tout comme la vitesse à laquelle vous marchez. Ces deux forces sont appelées la « force d'inertie totale ». Il y a aussi la force créée lorsque votre pied se connecte au sol, appelée « force de réaction au sol ». Ces forces doivent s'équilibrer, et la posture doit fonctionner pour y arriver. C'est ce qu'on appelle le " moment zéro " (ZMP).
Pour contrôler la posture d'ASIMO, les ingénieurs ont travaillé sur trois domaines de contrôle :
Bien qu'ASIMO ne soit pas tout à fait prêt pour les heures de grande écoute (il reste encore des améliorations à apporter pour lui permettre de fonctionner pleinement comme l'espère Honda), Honda a fait travailler ASIMO comme réceptionniste dans son bureau de Wako dans la préfecture de Saitama, juste au nord de Tokyo. ASIMO passe son temps à accueillir les clients et à les guider dans les installations.
Pour exercer ces fonctions, ASIMO doit être spécialement programmé pour connaître la disposition des bâtiments et la manière appropriée d'accueillir les visiteurs et de répondre aux questions.
Si l'idée d'une armée de robots ASIMO vous donne les heebie jeebies, vous pouvez vous détendre. Honda dit qu'ASIMO ne sera jamais utilisé dans des applications militaires.
Lire la suite

ASIMO peut détecter les mouvements de chute et y réagir rapidement; mais les ingénieurs d'ASIMO en voulaient plus. Ils voulaient que le robot ait un démarche douce ainsi que faire quelque chose que les autres robots ne peuvent pas faire -- tourner sans s'arrêter .

Quand nous marchons dans les coins, nous déplaçons notre centre de gravité dans le virage. ASIMO utilise une technologie appelée " contrôle prédictif des mouvements , " également appelée technologie intelligente de marche flexible en temps réel de Honda ou I-Walk, pour accomplir la même chose. ASIMO prédit de combien il devrait déplacer son centre de gravité vers l'intérieur du virage et combien de temps ce déplacement devrait être maintenu. Parce que cette technologie fonctionne en temps réel , ASIMO peut le faire sans s'arrêter entre les étapes, ce que les autres robots doivent faire.
Essentiellement, à chaque pas ASIMO, il doit déterminer son inertie, puis prédire comment son poids doit être déplacé pour la prochaine étape afin de marcher et de tourner en douceur. Il ajuste l'un des facteurs suivants afin de maintenir la bonne position :
Bien que la reproduction d'une marche humaine soit un exploit incroyable, ASIMO peut désormais rouler à des vitesses allant jusqu'à 3,7 miles par heure (6 kilomètres par heure). Afin de se qualifier comme un véritable robot de course, ASIMO doit avoir les deux pieds hors du sol pendant un instant à chaque pas. ASIMO parvient à être en l'air pendant 0,08 seconde à chaque pas en cours d'exécution.
Les ingénieurs de Honda ont rencontré un tout nouvel ensemble de défis tout en essayant de donner à ASIMO la capacité de fonctionner. Ils ont donné au torse d'ASIMO un degré de liberté pour l'aider à se plier et à se tordre afin que le robot puisse ajuster sa posture en vol. Sans cette capacité, ASIMO perdrait le contrôle en vol, éventuellement tourner en l'air ou trébucher lors de l'atterrissage.
Afin de faire des virages en douceur pendant la course, les ingénieurs ont amélioré la capacité d'ASIMO à incliner son centre de gravité à l'intérieur des virages pour maintenir l'équilibre et contrer la force centrifuge. ASIMO pouvait même anticiper les virages et commencer à s'y pencher avant d'amorcer le virage, un peu comme si vous faisiez du ski ou du patin.
Dans la section suivante, nous verrons comment ASIMO est capable de reconnaître des images et de détecter son environnement.
 Photo gracieuseté de Honda Motor Co., Ltd.
Photo gracieuseté de Honda Motor Co., Ltd. En robotique, la vision est une image capturée qui est interprétée sur la base de modèles . Dans un environnement de fabrication, où les bras robotiques construisent des voitures ou des robots inspectent les connexions microscopiques sur les puces semi-conductrices, vous avez affaire à un environnement contrôlé. L'éclairage est toujours le même, l'angle est toujours le même, et il y a un nombre limité de choses à regarder et à comprendre. Dans le monde réel (et non structuré), cependant, le nombre de choses à regarder et à comprendre augmente considérablement.
Un robot humanoïde qui doit naviguer dans les maisons, immeubles, ou à l'extérieur tout en effectuant des travaux doit être capable de donner un sens aux nombreux objets qu'il «voit». Ombres, les angles et les mouvements impairs doivent être compréhensibles. Par exemple, marcher seul dans une zone inconnue, un robot devrait détecter et reconnaître des objets en temps réel, sélectionner des caractéristiques telles que la couleur, forme et arêtes à comparer à une base de données d'objets ou d'environnements qu'il connaît. Il peut y avoir des milliers d'objets dans la « mémoire » du robot.
Le système de vision d'ASIMO se compose de deux caméras vidéo pour les yeux, situé dans sa tête. ASIMO utilise vision stéréoscopique et une propriété algorithme de vision qui laisse voir, reconnaître, et éviter de heurter des objets même si leur orientation et leur éclairage ne sont pas les mêmes que ceux de sa base de données mémoire. Ces caméras peuvent détecter plusieurs objets, déterminer la distance, percevoir le mouvement, reconnaître les visages programmés et même interpréter les mouvements de la main. Par exemple, lorsque vous levez la main vers ASIMO en position "stop", ASIMO s'arrête. La fonction de reconnaissance faciale permet à ASIMO de saluer des personnes "familières".
ASIMO peut reconnaître des objets en mouvement en interprétant les images capturées par les caméras dans sa tête. Il peut évaluer la distance et la direction d'un objet en mouvement, qui permet à ASIMO de suivre une personne, arrêter sa propre progression pour permettre à un objet en mouvement de croiser son chemin, ou vous saluer à votre approche.
Les caméras transmettent également ce que voit ASIMO au contrôleur ASIMO. De cette façon, si vous contrôlez ASIMO depuis un PC, vous pouvez voir ce que voit ASIMO.
En plus des caméras dans sa tête, ASIMO dispose de plusieurs capteurs qui l'aident à se déplacer dans les environnements et à interagir avec les objets et les personnes. Les capteurs de surface du sol permettent à ASIMO de détecter les objets et les changements dans le sol. Les capteurs à ultrasons aident à orienter ASIMO en détectant les objets environnants. Les capteurs aident ASIMO à résoudre les écarts entre la carte interne de la zone préprogrammée dans sa mémoire et l'environnement réel.
ASIMO a même le sens du toucher, dans un sens. Les capteurs de force dans les poignets d'ASIMO permettent à ASIMO de juger de la force à utiliser lors de la prise d'un plateau, vous remettre un dossier ou vous serrer la main. ASIMO peut intégrer les informations recueillies par ses caméras et ses capteurs de force pour se déplacer en synchronisation avec une personne tout en se tenant la main. Lorsque vous poussez un chariot, Les capteurs de force d'ASIMO aident le robot à ajuster la force nécessaire pour pousser le chariot (par exemple, ASIMO peut pousser un chariot avec plus de force si les capteurs détectent une pente).
ASIMO peut également détecter l'environnement grâce à l'utilisation de cartes de communication IC. Les cartes à puce utilisent des signaux infrarouges pour recevoir et transmettre des informations. Si vous détenez une carte à puce sur laquelle vos informations sont encodées, ASIMO peut détecter votre présence même si vous n'êtes pas dans le champ de vision de ses caméras. Ces cartes améliorent la capacité d'ASIMO à interagir avec les autres. Par exemple, si vous deviez visiter le bureau de Honda et recevoir une carte IC comme laissez-passer de visiteur, ASIMO pourra vous accueillir et vous diriger vers la bonne salle après lecture électronique des informations encodées sur votre carte.
Prêtez-moi vos microsIl y a trois microphones situés dans la tête d'ASIMO. En utilisant ces microphones, ASIMO peut recevoir des commandes vocales et détecter la direction du son. ASIMO peut déterminer d'où provient le son, puis se tourner pour faire face à cette direction.
ASIMO n'est pas un robot autonome. Il ne peut pas entrer dans une pièce et prendre des décisions par lui-même sur la façon de naviguer. ASIMO doit soit être programmé pour effectuer un travail spécifique dans une zone spécifique qui a des marqueurs qu'il comprend, ou il doit être contrôlé manuellement par un humain.
ASIMO peut être contrôlé par quatre méthodes :
En utilisant la technologie sans fil 802.11 et un ordinateur portable ou de bureau, vous pouvez contrôler ASIMO ainsi que voir ce que ASIMO voit via ses yeux de caméra. ASIMO peut également utiliser sa connexion PC pour accéder à Internet et récupérer des informations pour vous, comme les bulletins météo et les actualités.
Le joystick sans fil gère les mouvements d'ASIMO de la même manière que vous feriez fonctionner une voiture télécommandée. Vous pouvez faire avancer ASIMO, en arrière, de côté, en diagonale, tourner en place, marcher dans un coin ou courir en rond. Faire bouger ASIMO par télécommande peut ne pas sembler si avancé, mais ASIMO a la capacité de auto-ajuster ses étapes . Si vous l'avez, avancez, et il rencontre une pente ou une sorte d'obstacle, ASIMO ajuste automatiquement ses pas pour s'adapter au terrain.
ASIMO peut reconnaître et réagir à plusieurs gestes et postures du corps, permettant aux utilisateurs de commander ASIMO de manière non verbale. Vous pouvez indiquer un endroit particulier vers lequel ASIMO doit marcher, par exemple, et il suivra votre exemple. Si vous faites signe à ASIMO, il répondra par une vague qui lui est propre. Il peut même reconnaître quand vous voulez lui serrer la main.
ASIMO peut comprendre et exécuter des commandes verbales préprogrammées. Le nombre de commandes pouvant être programmées dans sa mémoire est pratiquement illimité. Vous pouvez également faire enregistrer votre voix dans sa programmation, ce qui permet à ASIMO de vous reconnaître plus facilement.
En plus des commandes vocales pour contrôler les mouvements d'ASIMO, il existe également des commandes vocales auxquelles ASIMO peut répondre verbalement. C'est cette caractéristique qui a permis à ASIMO de travailler comme réceptionniste, accueillir les visiteurs et répondre aux questions.
Comme la plupart des autres technologies dans le domaine de la robotique, ASIMO est alimenté par servomoteurs . Ce sont des moteurs petits mais puissants avec un arbre rotatif qui déplace les membres ou les surfaces à un angle spécifique tel que dirigé par un contrôleur. Une fois que le moteur a tourné à l'angle approprié, il s'éteint jusqu'à ce qu'on lui demande de tourner à nouveau. Par exemple, un servo peut contrôler l'angle de l'articulation du bras d'un robot, en le gardant à angle droit jusqu'à ce qu'il doive bouger, puis contrôler ce mouvement. Les servos utilisent un dispositif de détection de position (également appelé décodeur numérique) pour s'assurer que l'arbre du moteur est dans la bonne position. Ils utilisent généralement une puissance proportionnelle à la charge mécanique qu'ils supportent. Un servo légèrement chargé, par exemple, ne consomme pas beaucoup d'énergie.
ASIMO a 34 servomoteurs dans son corps qui bougent son torse, les bras, mains, jambes, pieds, chevilles et autres pièces mobiles. ASIMO gère une série de servomoteurs pour contrôler chaque type de mouvement.
ASIMO est alimenté par une batterie rechargeable, 51,8 volts batterie au lithium-ion (Li-ION) qui dure une heure sur une seule charge. La batterie est stockée dans l'ASIMO sac à dos et pèse environ 13 livres . La batterie d'ASIMO prend trois heures charger complètement, donc une deuxième (et troisième) batterie est cruciale si vous avez besoin que ASIMO fonctionne très longtemps. Les utilisateurs peuvent charger la batterie à bord d'ASIMO via une connexion électrique ou retirer le sac à dos pour charger séparément.
Compétitions de robots
Honda Research Institute et ATR Computational Neuroscience Laboratories se sont associés en 2006 pour développer un moyen de contrôler ASIMO par la pensée. Les scientifiques et les ingénieurs ont utilisé une machine IRM pour enregistrer les schémas cérébraux d'un sujet lors d'une série de gestes de la main (un poing fermé et le signe de paix « V »). L'enregistrement a ensuite été transmis à une main robotisée, qui décodaient les informations et dupliquaient les gestes du sujet. Parce que le système d'IRM était non invasif, aucune intervention chirurgicale n'a été nécessaire.
Honda espère qu'il s'agit de la première étape du développement d'un système qui permettra aux personnes paralysées de contrôler des appareils tels que ASIMO en y pensant simplement. Il faut faire beaucoup plus de recherches pour permettre aux utilisateurs d'exécuter des tâches complexes et de développer un plus petit, appareil léger pour enregistrer les schémas cérébraux.
Curieux de connaître les servos ?Consultez l'introduction aux servomoteurs du laboratoire de conception mécatronique de la Northwestern University.
Lire la suite
Honda a commencé le développement de son robot assistant humanoïde en 1986. Les ingénieurs de Honda savaient que le robot devait être capable de se déplacer facilement dans une maison ou un bâtiment, et cela signifiait que la technologie de marche devait être parfaite. Par conséquent, leurs premières tentatives étaient essentiellement des boîtes avec des jambes. Une fois que le mécanisme de marche a été en grande partie développé, les bras, des mains et enfin une tête ont été ajoutées.
La chronologie ASIMO
 Photo de courtoisie
Photo de courtoisie En plus d'ASIMO, il existe d'autres robots humanoïdes assez sophistiqués qui semblent faire à peu près les mêmes choses. La plupart d'entre eux sont construits sur un à plus petite échelle et sont davantage destinés à divertissement que le service. À l'heure actuelle, La plus grande concurrence d'ASIMO en termes de technologie semble être :
Il existe également plusieurs robots différents utilisés dans les hôpitaux du monde entier qui naviguent dans les couloirs et prennent les ascenseurs pour livrer les dossiers des patients, radiographies, des médicaments et d'autres choses partout dans l'hôpital. Ils se déplacent sur roues et sont programmés avec l'aménagement de l'hôpital ou ils identifient et suivent des marqueurs et des codes-barres placés sur les murs.
Les robots sont utilisés dans de nombreux domaines depuis les années 1960. Les processeurs informatiques devenant de plus en plus puissants et la technologie robotique s'étendant à de nouveaux domaines, il ne faudra pas longtemps avant que nous ayons une "Rosie" pour préparer nos repas et nettoyer nos maisons.
Pour plus d'informations sur ASIMO et autres robots, ainsi que les avancées technologiques qui rendent possibles les robots humanoïdes, consultez les liens sur la page suivante.
Un robot sur la villeASIMO a charmé le public lors d'événements médiatiques, émissions de télévision, et même Disneyland. Vous avez peut-être vu ASIMO :