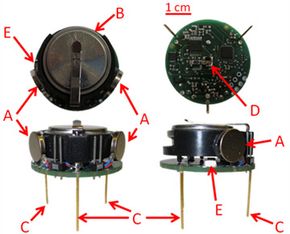
 Rencontrez le Kilobot. Dans le sens horaire à partir du coin supérieur gauche, tu regardes en haut, bas, vues de côté et de face, respectivement. Vous pouvez également voir les différentes parties d'un Kilobot :A) moteurs de vibration, B) batterie lithium-ion, C) jambes d'appui, D) émetteur/récepteur infrarouge et E) LED. Voir plus de photos de robots. Image reproduite avec l'aimable autorisation de Michael Rubenstein, Nicholas Hoff et Radhika Nagpal
Rencontrez le Kilobot. Dans le sens horaire à partir du coin supérieur gauche, tu regardes en haut, bas, vues de côté et de face, respectivement. Vous pouvez également voir les différentes parties d'un Kilobot :A) moteurs de vibration, B) batterie lithium-ion, C) jambes d'appui, D) émetteur/récepteur infrarouge et E) LED. Voir plus de photos de robots. Image reproduite avec l'aimable autorisation de Michael Rubenstein, Nicholas Hoff et Radhika Nagpal Après avoir organisé un barbecue d'arrière-cour extrêmement amusant avec des amis, vous démarrez le processus de nettoyage moins amusant. Malgré ta détermination, vous laisserez probablement quelques miettes derrière vous - et les restes de votre barbecue dans votre jardin attireront probablement l'une des meilleures équipes de la nature.
Cela commence par un essaim de fourmis affamées avançant vers le tas de chips écrasées sur le ciment. Pièce par pièce, les fourmis ramassent les miettes pour les ramener au nid. Les petits insectes travaillent ensemble, aider à soulever des morceaux plusieurs fois leur taille. Agir collectivement, ils réalisent ce qu'un individu ne peut pas faire seul.
Et si on pouvait concevoir des robots comme ces fourmis, capable de travailler à la fois de manière indépendante et dans son ensemble ? Pour la plupart, créer de petites armées de robots a été coûteux et chronophage, amener les scientifiques à s'en tenir aux simulations informatiques plutôt qu'à la réalité.
Entrer Kilobot . Des chercheurs de l'Université Harvard ont créé les petits robots dans l'espoir de créer un moyen simple et peu coûteux de tester algorithmes -- ou des étapes programmées pour résoudre des problèmes -- à travers un groupe de nombreux robots. Depuis mars 2012, le groupe avait créé de petits essaims de Kilobots, avec un objectif plus large de construire un « kilobit » de Kilobots :un collectif de 1, 024 individus (et d'où le projet tire son nom) [source :Rubenstein].
Ces machines simples peuvent aider à tester et développer des comportements complexes dans d'autres types de robots. Les partisans de Kilobot disent que le système pourrait affiner les robots qui trouvent et sauvent les personnes des bâtiments effondrés ou peut-être aider à nettoyer les boules de pétrole collantes des environnements pollués.
Considérez les Kilobots comme une flotte de test :ils ne posséderont pas nécessairement les qualités - comme les roues - que d'autres machines auront. Plutôt, ils sont le terrain de jeu où les scientifiques peuvent expérimenter et régler les problèmes de leur programmation avant de consacrer leurs dollars de recherche à des projets plus importants, robots plus complexes.
Contenu
Commander un robot à l'action peut être un jeu d'enfant, mais faire en sorte qu'un groupe entier fonctionne avec la même précision n'est pas aussi facile - ou bon marché.
L'un des plus gros attraits des Kilobots est leur conception simple et leur prix bas. Michel Rubenstein, qui ont aidé à développer les robots avec d'autres chercheurs de l'Université Harvard, affirme que la réduction des coûts et du temps d'assemblage était une priorité.
Chaque composant a une utilisation basique, qu'il se déplace ou qu'il signale à ses copains mécaniciens à proximité. Les Kilobots sont uniques en ce qu'ils restent en "mode veille" jusqu'à ce qu'ils soient invoqués par le contrôleur aérien. Une personne peut activer un essaim entier de Kilobots en envoyant un seul signal, au lieu d'allumer manuellement chaque robot.
Si un Kilobot de 1,3 pouces (33 millimètres) est ce que votre cœur désire, voici une liste de base de ce dont vous aurez besoin pour en donner vie [sources :Rubenstein et al., K-Team Corp.] :
Vous en avez fini avec ce bricolage ? Plongeons dans ce que les Kilobots peuvent réellement faire.
Bits et botsLes pièces de chaque Kilobot coûtaient moins de 15 $, soit environ 10 fois moins cher que les robots collectifs les moins chers en 2012 [source :Rubenstein et al.]. Un robot prend environ cinq minutes à assembler. Et pour les experts en programmation et en robotique, le modèle de ces robots de base est open-source, ce qui signifie que les étapes sont accessibles à tous. Une société appelée K-Team Corporation vend également des Kilobots assemblés.
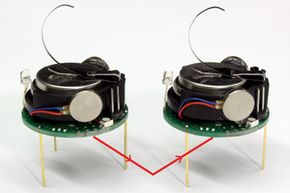 Le Kilobot de gauche transmet un signal en le faisant rebondir sur la table au Kilobot de droite, qui le reçoit. Image reproduite avec l'aimable autorisation de Michael Rubenstein, Nicholas Hoff et Radhika Nagpal
Le Kilobot de gauche transmet un signal en le faisant rebondir sur la table au Kilobot de droite, qui le reçoit. Image reproduite avec l'aimable autorisation de Michael Rubenstein, Nicholas Hoff et Radhika Nagpal Nous l'avons déjà dit. Nous le répétons :les Kilobots sont conçus pour être les ultimes testeurs d'algorithmes.
Disons que le personnel d'urgence veut amener des robots sur les lieux pour une mission de recherche et de sauvetage. Ils auraient besoin de savoir dans quelle mesure les machines pouvaient communiquer entre elles. C'est là que les Kilobots sont particulièrement utiles comme mannequins de test.
Chaque robot peut faire rebondir un signal infrarouge du sol vers un autre robot à côté de lui, lui permettant de sentir où il se trouve par rapport aux autres dans l'essaim (voir photo). Faire rebondir ce signal peut également garantir que ses voisins robotiques sont sur la même longueur d'onde pour quand et comment une tâche est censée être effectuée. Savoir où se trouvent les autres robots est essentiel lorsqu'il s'agit de localiser des objets dans un environnement donné et de les ramener à la base d'origine.
Jusque là, il y a trois comportements d'essaim de base que les Kilobots maîtrisent :contrôle et synchronisation de la formation.
Recherche de nourriture Voilà à quoi cela ressemble :commander à plusieurs robots de se disperser et d'explorer la zone qui les entoure. Avec Kilobot, l'idée est de réduire le temps qu'il faut pour fourrager dans un endroit particulier. C'est ici que la signalisation aux autres dans l'essaim est utile. Michel Rubenstein, un chercheur qui a aidé à concevoir les robots, dit que la recherche de nourriture en groupe est beaucoup plus efficace qu'individuellement, surtout dans les situations d'urgence.
« S'il y a un bâtiment qui s'est effondré à cause d'un tremblement de terre, et il y a une personne qui est coincée dans ce bâtiment -- si vous envoyez un seul robot, cela peut prendre beaucoup plus de temps pour trouver cette personne que si vous envoyez un grand groupe de robots pour trouver cette personne, " dit-il. Bien qu'un immeuble effondré et un appartement, tableau blanc sont des environnements totalement différents, les algorithmes utilisés pour naviguer dans les deux sont similaires.
Une autre partie importante des essaims efficaces est contrôle des formations , la capacité de se comporter à l'unisson ou dans une partie spécifique de l'essaim. En maintenant la communication les uns avec les autres, Les Kilobots possèdent un capteur de relèvement virtuel qui donne à chacun une idée réaliste de sa position dans le groupe. Au lieu d'utiliser du matériel pour y parvenir, Les Kilobots se contentent de logiciels basiques et d'algorithmes plus avancés. Exécuter des comportements complexes avec le moins de matériel possible englobe l'esprit des Kilobots.
Dans un système où chaque robot est censé être sur la même longueur d'onde, synchronisation questions. Si une partie de l'essaim doit effectuer une tâche pendant un certain temps, puis passer à une autre quelques secondes plus tard, tout le groupe doit avoir la même horloge interne. Une façon de visualiser cela est d'imaginer un essaim de 1, 000 Kilobots, chacun utilisant sa lumière LED pour représenter un pixel dans une vidéo plus grande qui peut être visionnée d'en haut. Pour savoir quelle couleur signaler à un moment donné, chaque Kilobot doit utiliser la même horloge.
Bien qu'ils soient chéris du milieu universitaire, Les kilobots sont prometteurs dans le monde réel, trop. Ce sont en quelque sorte des planches à dessin. Supposons qu'un chercheur inspiré rêve de construire un essaim de robots insectes pour polliniser les cultures. Il ou elle gagnerait à tester les Kilobots en premier.
Les petits robots peuvent également faire la lumière sur intelligence d'essaim , ou le comportement collectif d'un groupe, et comment mieux gérer les grands gangs de robots.
Prendre les transports collectifs, par exemple. Les fourmis utilisent le comportement pour ramener des aliments (comme ces miettes de croustilles) dans leur nid. Les chercheurs ont appris que certains individus - fourmis et robots - jouent un rôle particulier dans le processus. Certains peuvent créer un chemin en forme de chaîne qui guide les butineuses vers le nid, tandis que d'autres sont chargés de travailler ensemble pour transporter l'objet d'un endroit à l'autre. Dans l'arène Kilobot, tester le même principe pourrait aider les robots scolaires à détecter et à nettoyer les dégâts dans un environnement donné - comme les déversements de pétrole, par exemple.
Ils peuvent également être utiles pour créer de meilleures cartes ou des instantanés d'environnements. Les robots pourraient le faire en explorant une zone et en créant une carte spatiale pour référence. D'autres missions pourraient inclure la pollinisation des cultures ou la direction d'opérations de recherche et de sauvetage [source :Rutter].
Michel Rubenstein, l'un des scientifiques qui ont créé Kilobots, dit que les recherches futures se concentreront sur la mise au point de nouveaux algorithmes qui facilitent le contrôle de l'essaim. Programmer les robots pour effectuer des activités de transport collectif et trouver des moyens de créer des formes utiles à partir des robots (comme la partie effondrée d'un bâtiment, par exemple) restent prioritaires. Qui sait, peut-être que les Kilobots inspireront des robots qui ressemblent aux Transformers, les favoris de la science-fiction. L'idée est d'avoir de l'intelligence, des robots plus petits qui peuvent se connecter pour former un plus grand, un plus puissant.
Toujours, Rubenstein dit qu'il y a beaucoup de place pour l'amélioration. Construire un 1, 000 essaim de robots a pris du temps. Et même si les Kilobots peuvent s'auto-corriger, ils manquent de précision lorsqu'ils voyagent sur de longues distances.
Les fourmis essaiment vers un objet plusieurs fois leur taille et le ramassent sans effort (ou il semble que ce soit le cas). Mais il y a toute une couche de communication qui nous manque si nous ne regardons pas de près. Si nous voulons des machines intelligentes avec des capacités similaires, nous devons prendre quelques conseils de la nature. Ce qui m'a le plus surpris en écrivant sur Kilobots, ce ne sont pas les robots eux-mêmes, mais le niveau de détail requis pour faire fonctionner les programmes et les algorithmes. Les kilobots ne font qu'effleurer la surface lorsqu'il s'agit des idées fascinantes que les chercheurs testent. Ces minuscules, les armées mécaniques rappellent à quel point le monde est ordonné et complexe, et comment essayer de le comprendre est la moitié du plaisir.














