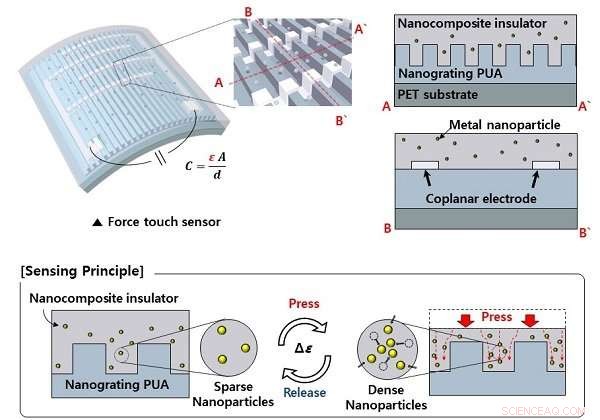
Illustration schématique d'un transparent, capteur tactile de force flexible (image supérieure) et amélioration de la sensibilité en utilisant la concentration de contrainte (image inférieure). Crédit :KAIST
Les chercheurs ont signalé un capteur tactile nanoforce haute performance et transparent en développant un mince, souple, et un film nanocomposite hiérarchique transparent (HNC). L'équipe de recherche affirme que leur capteur présente simultanément tous les caractères nécessaires pour une application de qualité industrielle :haute sensibilité, transparence, insensibilité à la flexion, et la fabricabilité.
Les capteurs tactiles de force qui reconnaissent l'emplacement et la pression des stimuli externes ont reçu une attention considérable pour diverses applications, tels que les appareils portables, écrans flexibles, et des robots humanoïdes. Depuis des décennies, d'énormes quantités de recherche et de développement ont été consacrées à l'amélioration de la sensibilité à la pression pour réaliser des dispositifs de détection de qualité industrielle. Cependant, il reste un défi d'appliquer des capteurs tactiles de force dans des applications flexibles, car les performances de détection sont sujettes à changement et dégradées par les contraintes mécaniques et les déformations induites lorsque l'appareil est plié.
Pour surmonter ces problèmes, l'équipe de recherche s'est concentrée sur le développement de capteurs sans entrefer pour rompre avec la technologie conventionnelle où les capteurs de force tactile doivent avoir des entrefers entre les électrodes pour une sensibilité et une flexibilité élevées.
Le capteur tactile de force sans entrefer proposé est basé sur un isolant nanocomposite transparent contenant des nanoparticules métalliques qui peuvent maximiser le changement de capacité des diélectriques en fonction de la pression, et un substrat de nanoréseau qui peut augmenter la transparence ainsi que la sensibilité en concentrant la pression. Par conséquent, l'équipe a réussi à fabriquer un très sensible, transparent, capteur tactile de force flexible qui est mécaniquement stable contre les pressions répétitives.
Par ailleurs, en plaçant les électrodes de détection sur le même plan que le plan neutre, le capteur tactile de force peut fonctionner, même en se pliant au rayon du stylo à bille, sans modification des niveaux de performance.
La force tactile proposée a également satisfait des considérations commerciales dans la production de masse telles que l'uniformité de grande surface, reproductibilité de fabrication, et fiabilité en fonction de la température et de l'utilisation à long terme.
Finalement, l'équipe de recherche a appliqué le capteur développé à un appareil portable de soins de santé capable de surveiller le pouls et a détecté un pouls humain en temps réel. En outre, l'équipe de recherche a confirmé avec HiDeep, Inc. qu'un capteur de grande surface de sept pouces peut être intégré dans un smartphone commercial.