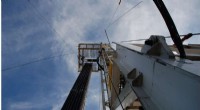
Un planeur de mer, avec la plate-forme de glace Getz en arrière-plan, en cours de préparation pour un déploiement en janvier 2018 sous la plate-forme de glace Dotson voisine. Crédit :Jason Gobat/Université de Washington
Une équipe de robots océaniques déployée en janvier 2018 a, au cours de l'année écoulée, ont été les premiers robots océaniques autoguidés à voyager avec succès sous une calotte glaciaire et à revenir rapporter des observations à long terme.
Au-delà de la simple survie, la mission robotique, un partenariat entre le College of the Environment de l'Université de Washington, le laboratoire de physique appliquée de l'UW, l'Observatoire de la Terre Lamont-Doherty de l'Université de Columbia, l'Institut coréen de recherche polaire et la Fondation de la famille Paul G. Allen — s'est aventuré 18 fois sous la banquise, atteignant à plusieurs reprises plus de 40 kilomètres (25 miles) dans la cavité, parmi les voyages les plus éloignés à ce jour dans cet environnement dangereux.
"C'est la première fois que l'un des modernes, des plates-formes de longue endurance ont effectué des mesures soutenues sous une banquise, " a déclaré Craig Lee, professeur d'océanographie à l'UW et membre du Laboratoire de physique appliquée. "Nous avons fait des mesures approfondies à l'intérieur de la cavité. Les planeurs ont pu naviguer à volonté pour arpenter l'intérieur de la cavité, tandis que les flotteurs chevauchaient les courants océaniques pour accéder à l'intérieur de la cavité.
"C'est un grand pas en avant, " Lee a ajouté. "C'est la première fois que nous avons été en mesure de maintenir une présence persistante sur la durée d'une année entière."
Le projet financé par la Fondation de la famille Paul G. Allen cherche à démontrer la technologie et à recueillir plus de données sur la face inférieure des plates-formes de glace qui renforcent les calottes glaciaires beaucoup plus grandes. Des observations directes de la façon dont l'eau de mer plus chaude interagit avec la face inférieure des plateaux de glace amélioreraient les modèles de dynamique des calottes glaciaires en Antarctique et au Groenland, qui détiennent les plus grandes inconnues pour l'élévation mondiale du niveau de la mer.
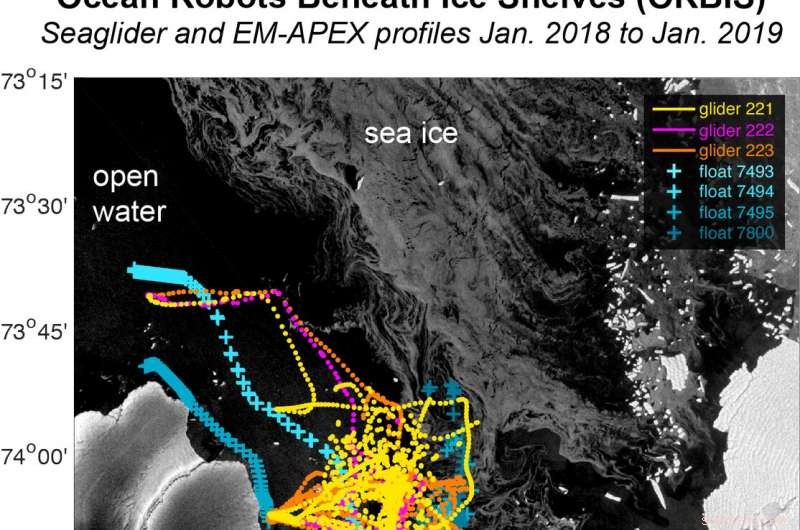
Les itinéraires de voyage des instruments au cours de la dernière année. Rose, les pistes orange et jaune montrent les trois Seagliders en auto-navigation. Les traces de sarcelle montrent les flotteurs à la dérive. L'arrière-plan est une image satellite de Dotson Ice Shelf capturée le 28 février. Crédit :Luc Rainville/Université de Washington
"Certaines calottes glaciaires se terminent par de grandes banquises qui flottent au-dessus de l'océan, et ceux-ci servent de contrefort, " dit Lee. " Si les banquises s'effondrent ou s'affaiblissent, en raison de la fonte océanique, par exemple, les calottes glaciaires derrière eux peuvent accélérer vers la mer, augmenter le taux d'élévation du niveau de la mer."
« La plupart des incertitudes dans les prévisions mondiales d'élévation du niveau de la mer pour des décennies voire des siècles proviennent des calottes glaciaires, qui pourrait contribuer de 1 pied à 6 pieds d'ici 2100, " dit Pierre Dutrieux, professeur-chercheur en océanographie à l'Observatoire de la Terre de Lamont-Doherty. "L'interaction avec la chaleur océanique est un facteur clé et ces nouveaux outils ouvrent des perspectives alléchantes pour améliorer la compréhension actuelle."
La mission s'est lancée fin 2017 pour tester une nouvelle approche de collecte de données sous une banquise, et le 24 janvier, 2018, appareils ont été largués du brise-glace coréen R/V Araon. Cette semaine, deux Seagliders autonomes ont atteint le jalon d'un an de fonctionnement continu autour et sous la banquise.
Sous-marins robots exploités par le British Antarctic Survey, connu sous le nom d'Autosub3 et de Boaty McBoatface, effectué avec succès des voyages de 24 à 48 heures en 2009, 2014 et 2018. Ces missions ont étudié des distances similaires dans la cavité mais ont échantillonné sur des périodes plus courtes en raison de la nécessité d'un support de navire.
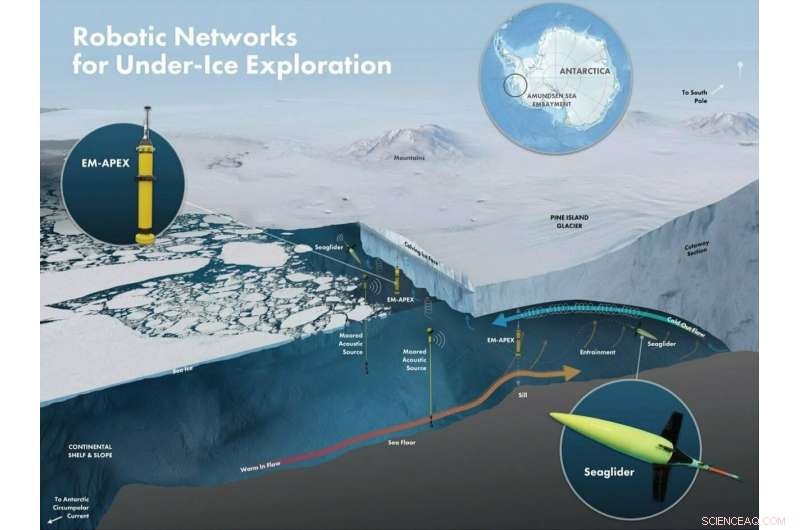
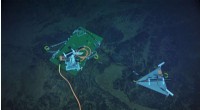
Ce croquis montre comment trois Seagliders autonomes et quatre flotteurs dérivants ont suivi les conditions sous une plate-forme de glace antarctique. A l'intérieur de ces grottes, de l'eau salée plus chaude s'écoule au fond, transportant de la chaleur qui peut ronger la glace, et de l'eau de fonte glaciaire plus fraîche s'écoule au-dessus. Crédit :Université de Washington
Par contre, la technologie de l'équipe basée aux États-Unis est plus petite, des appareils plus légers qui peuvent fonctionner seuls pendant plus d'un an sans aucun support de navire. La technique expérimentale du groupe a d'abord amarré trois balises acoustiques au fond marin pour permettre la navigation sous la banquise. Il a ensuite envoyé trois Seaglider, robots nageurs développés et construits à l'UW, d'utiliser des systèmes de navigation préprogrammés pour se déplacer sous la banquise afin de collecter des données.
La mission a également déployé quatre instruments flottants EM-APEX développés par UW qui dérivent avec les courants à des profondeurs présélectionnées au-dessus du fond, ou en dessous du sommet de la cavité, tout en se balançant périodiquement de haut en bas pour collecter plus de données. Ces quatre instruments à la dérive ont voyagé avec succès sous la banquise avec le plus lourd, eau plus salée près du fond marin. Trois ont été évacués avec de l'eau de fonte fraîche près du sommet de la cavité de glace environ six à huit semaines plus tard. Un flotteur est resté sous beaucoup plus longtemps, seulement pour réapparaître le 5 janvier.
Au cours de l'année écoulée, la flotte de robots a franchi plusieurs étapes :
Les chercheurs analysent maintenant les données pour une publication future, pour mieux comprendre comment l'eau de mer interagit avec les plates-formes glaciaires et améliorer les modèles de comportement de la calotte glaciaire.

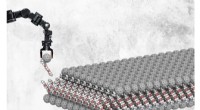
Un robot à la dérive connu sous le nom d'explorateur de profilage électromagnétique autonome, ou EM-APEX, est descendu dans l'océan. C'est l'un des quatre flotteurs qui ont voyagé avec les courants sous la plate-forme de glace Dotson. Crédit :Fondation de la famille Paul G. Allen