Crédit :Université de Washington
Au début de la pandémie de COVID-19, les constructeurs automobiles tels que Ford ont rapidement déplacé leur objectif de production des automobiles vers les masques et les ventilateurs.
Pour rendre ce changement possible, ces entreprises se sont appuyées sur des personnes travaillant sur une chaîne de montage. Il aurait été trop difficile pour un robot de faire cette transition car les robots sont liés à leurs tâches habituelles.
Théoriquement, un robot pourrait ramasser presque n'importe quoi si ses pinces pouvaient être échangées pour chaque tâche. Pour réduire les coûts, ces pinces pourraient être passives, ce qui signifie que les pinces saisissent des objets sans changer de forme, de la même manière que les pinces d'un chariot élévateur fonctionnent.
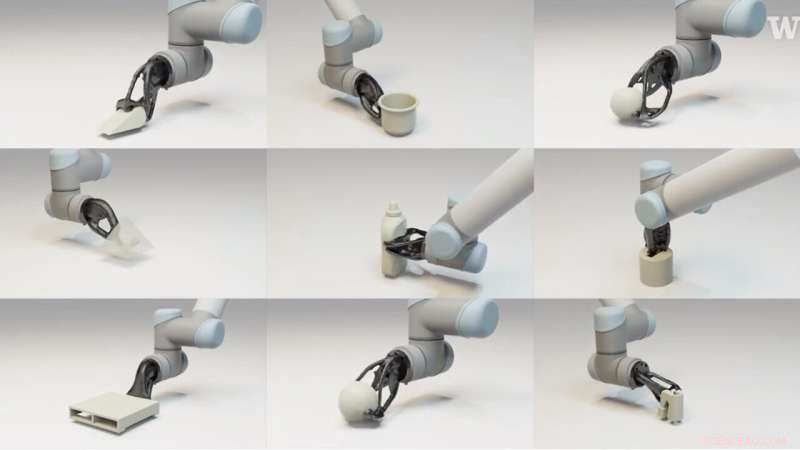
Une équipe de l'Université de Washington a créé un nouvel outil capable de concevoir une pince passive imprimable en 3D et de calculer le meilleur chemin pour saisir un objet. L'équipe a testé ce système sur une suite de 22 objets, dont un lapin imprimé en 3D, une cale en forme de butée de porte, une balle de tennis et une perceuse. Les préhenseurs et les chemins conçus ont réussi pour 20 des objets. Deux d'entre eux étaient le coin et une forme pyramidale avec un trou de serrure incurvé. Les deux formes sont difficiles à saisir pour plusieurs types de pinces.
L'équipe présentera ces résultats le 11 août au SIGGRAPH 2022.
"Nous produisons toujours la plupart de nos articles avec des chaînes de montage, qui sont vraiment géniales mais aussi très rigides. La pandémie nous a montré que nous devons avoir un moyen de réutiliser facilement ces chaînes de production", a déclaré l'auteure principale Adriana Schulz, professeure adjointe à l'UW. à la Paul G. Allen School of Computer Science &Engineering. "Notre idée est de créer des outils personnalisés pour ces lignes de fabrication. Cela nous donne un robot très simple qui peut effectuer une tâche avec un préhenseur spécifique. Et puis, lorsque je change de tâche, je remplace simplement le préhenseur."
Les préhenseurs passifs ne peuvent pas s'adapter à l'objet qu'ils saisissent, donc traditionnellement, les objets ont été conçus pour correspondre à un préhenseur spécifique.
"La pince passive la plus performante au monde est la pince sur un chariot élévateur. Mais le compromis est que les pinces pour chariot élévateur ne fonctionnent bien qu'avec des formes spécifiques, telles que des palettes, ce qui signifie que tout ce que vous voulez saisir doit être sur une palette", a déclaré co-auteur Jeffrey Lipton, professeur adjoint de génie mécanique à l'UW. "Ici, nous disons 'D'accord, nous ne voulons pas prédéfinir la géométrie du préhenseur passif.' Au lieu de cela, nous voulons prendre la géométrie de n'importe quel objet et concevoir une pince."
Pour tout objet donné, il existe de nombreuses possibilités pour ce à quoi pourrait ressembler son préhenseur. De plus, la forme du préhenseur est liée à la trajectoire empruntée par le bras du robot pour saisir l'objet. S'il est mal conçu, un préhenseur pourrait percuter l'objet en route pour le ramasser. Pour relever ce défi, les chercheurs disposaient de quelques idées clés.
"Les points où la pince entre en contact avec l'objet sont essentiels pour maintenir la stabilité de l'objet dans la prise. Nous appelons cet ensemble de points la" configuration de la prise "", a déclaré l'auteur principal Milin Kodnongbua, qui a terminé cette recherche en tant qu'étudiant de premier cycle UW. à l'école Allen. "En outre, le préhenseur doit entrer en contact avec l'objet à ces points donnés, et le préhenseur doit être un seul objet solide reliant les points de contact au bras du robot. Nous pouvons rechercher une trajectoire d'insert qui satisfait à ces exigences."
Lors de la conception d'un nouveau préhenseur et d'une nouvelle trajectoire, l'équipe commence par fournir à l'ordinateur un modèle 3D de l'objet et son orientation dans l'espace - comment il serait présenté sur un tapis roulant, par exemple.
"Notre algorithme génère d'abord des configurations de préhension possibles et les classe en fonction de la stabilité et d'autres mesures", a déclaré Kodnongbua. "Ensuite, il prend la meilleure option et co-optimise pour trouver si une trajectoire d'insertion est possible. S'il n'en trouve pas, il passe à la prochaine configuration de prise sur la liste et essaie à nouveau de faire la co-optimisation."
Une fois que l'ordinateur a trouvé une bonne correspondance, il sort deux jeux d'instructions :un pour une imprimante 3D pour créer le préhenseur et un avec la trajectoire pour le bras du robot une fois le préhenseur imprimé et attaché.
L'équipe a choisi une variété d'objets pour tester la puissance de la méthode, y compris certains d'un ensemble de données d'objets qui sont la norme pour tester la capacité d'un robot à effectuer des tâches de manipulation.
"Nous avons également conçu des objets qui seraient difficiles pour les robots de préhension traditionnels, tels que des objets avec des angles très faibles ou des objets avec une préhension interne, où vous devez les saisir avec l'insertion d'une clé", a déclaré le co-auteur Ian Good, un Doctorant UW dans le département de génie mécanique.
Les chercheurs ont effectué 10 micros de test avec 22 formes. Pour 16 formes, les 10 micros ont réussi. Alors que la plupart des formes avaient au moins un ramassage réussi, deux n'en avaient pas. Ces échecs résultaient de problèmes avec les modèles 3D des objets qui ont été donnés à l'ordinateur. Pour un - un bol - le modèle a décrit les côtés du bol comme plus minces qu'ils ne l'étaient. Pour l'autre, un objet qui ressemble à une tasse avec une anse en forme d'œuf, le modèle n'avait pas sa bonne orientation.
L'algorithme a développé les mêmes stratégies de préhension pour des objets de forme similaire, même sans aucune intervention humaine. Les chercheurs espèrent que cela signifie qu'ils seront en mesure de créer des pinces passives qui pourraient saisir une classe d'objets, au lieu d'avoir à avoir une pince unique pour chaque objet.
Une limitation de cette méthode est que les pinces passives ne peuvent pas être conçues pour ramasser tous les objets. Bien qu'il soit plus facile de saisir des objets dont la largeur varie ou qui ont des bords saillants, les objets dont la surface est uniformément lisse, comme une bouteille d'eau ou une boîte, sont difficiles à saisir sans aucune pièce mobile.
Pourtant, les chercheurs ont été encouragés de voir l'algorithme fonctionner si bien, en particulier avec certaines des formes les plus difficiles, comme une colonne avec un trou de serrure en haut.
"Le chemin que notre algorithme a trouvé pour celui-là est une accélération rapide jusqu'à l'endroit où il se rapproche vraiment de l'objet. Il semblait qu'il allait s'écraser sur l'objet, et j'ai pensé, "Oh non. Et si nous ne l'avions pas bien calibré ? ", A déclaré Good. "Et puis, bien sûr, il devient incroyablement proche et le capte parfaitement. C'était ce moment impressionnant, une montagne russe extrême d'émotion."
Yu Lou, qui a terminé cette recherche en tant qu'étudiant à la maîtrise à l'école Allen, est également co-auteur de cet article.