Crédit :Geist et al.
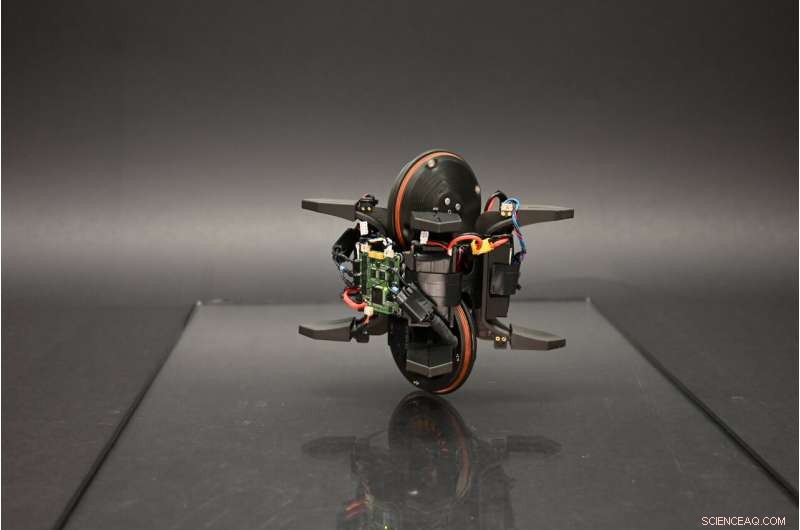
Des chercheurs de l'Université RWTH d'Aix-la-Chapelle dans l'équipe du professeur Sebastian Trimpe et de l'Institut Max Planck pour les systèmes intelligents (MPI-IS) de Stuttgart ont récemment développé le Wheelbot, un monocycle à roue à réaction symétrique qui peut sauter de manière autonome sur ses roues depuis n'importe quelle position initiale. Ce robot unique, présenté dans un article publié dans les IEEE Robotics and Automation Letters a été fabriqué à l'aide d'une combinaison de composants prêts à l'emploi et imprimés en 3D.
"Notre groupe de recherche travaille à l'intersection entre la science des données et l'ingénierie. Une direction particulière de notre recherche se concentre sur la combinaison des connaissances de la théorie du contrôle avec l'apprentissage automatique", a déclaré à Tech René Geist, membre de l'équipe de Trimpe à Aix-la-Chapelle et chercheur principal derrière le Wheelbot. Xplore. "Les bancs d'essai tels que les pendules, les bras de robot et les quadricoptères nous aident à vérifier si les hypothèses théoriques sous-jacentes à un algorithme sont pratiques dans la réalité. Idéalement, ces bancs d'essai sont simples à utiliser tout en étant difficiles à contrôler avec des algorithmes de pointe. , nous forçant à sortir des sentiers battus."
Deux autres exemples de tels bancs d'essai sont le "Cube d'équilibrage" et son descendant le "Cubli". Ces deux systèmes ont souvent aidé à évaluer l'efficacité des systèmes de contrôle de réseau et des méthodes basées sur les données pour obtenir un contrôle non linéaire.
Les travaux récents de Trimpe, Geist et leurs collègues s'appuient sur ces efforts antérieurs dans le domaine. Leur objectif était de développer un robot monocycle minimaliste qui pourrait être utilisé comme banc d'essai par des roboticiens et des informaticiens du monde entier. Pour ce faire, Trimpe et son groupe de recherche de l'Université RWTH d'Aix-la-Chapelle se sont associés à Jonathan Fiene, responsable du laboratoire de robotique ZWE au MPI-IS.
"Au début du projet, nous avons opté pour l'utilisation de moteurs sans balais, car la robotique ZWE a beaucoup d'expérience dans leur utilisation dans le cadre de l'initiative de robot dynamique ouvert, tandis que les prix des moteurs sans balais légers ont chuté en raison de l'adaptation généralisée des quadricoptères chez le consommateur. marché », a expliqué Geist. "Lorsque vous regardez un moteur, l'actionneur le plus simple que l'on puisse trouver est sans doute d'y attacher une roue. Si une telle roue touche le sol, nous l'appelons une" roue qui roule ", si ce n'est pas le cas, nous nous référons à comme une 'roue de réaction'."
Équilibrer un robot monocorps non volant avec la capacité de conduire et d'effectuer des manœuvres nécessite généralement un minimum de deux roues. Il peut s'agir soit de roues roulantes, résultant en un robot de type Segway, soit d'une seule roue roulante et d'une roue de réaction, résultant en ce que l'on appelle un robot monocycle "roue de réaction" ou "échange de moment".
Les robots monocycles intégrant des roues de réaction ont des conceptions très simples et peuvent être facilement assemblés par des roboticiens experts et des étudiants. Malgré leur simplicité, les monocycles à roue de réaction sont assez difficiles à contrôler. Cela en fait des bancs d'essai particulièrement favorables pour la recherche sur les réseaux de robots et les méthodes de contrôle basées sur l'apprentissage.
"Les robots monocycles proposés précédemment sont conçus pour s'équilibrer uniquement autour de leur position d'équilibre verticale, ce qui limite considérablement ce que vous pouvez faire avec ces systèmes", a déclaré Geist. "Pour maximiser l'utilité d'un robot monocycle à roue de réaction, nous avons décidé que le Wheelbot devait pouvoir se remettre de perturbations assez importantes, disposer d'une alimentation électrique embarquée pour éviter que des câbles ne limitent sa maniabilité, et en plus pouvoir se redresser après renverser."
Comme les roues des monocycles, le Wheelbot a une roue qui roule qui l'empêche de basculer lors d'un déplacement longitudinal. Contrairement aux monocycles, le robot intègre également une roue de réaction qui l'empêche de basculer dans le sens latéral.
"Pour saisir le fonctionnement interne d'une roue de réaction, vous pouvez faire une expérience simple à la maison", a déclaré Geist. "Tout ce dont vous avez besoin est une chaise pivotante et un objet modérément lourd, comme un chat. Asseyez-vous avec vos genoux sur la chaise et tendez vos bras tout en tenant le chat, puis faites pivoter le haut de votre corps dans le sens des aiguilles d'une montre. Pendant que le chat succombe à son destin, vous remarquerez que vos genoux tournent dans le sens inverse des aiguilles d'une montre. Dans cette analogie, le haut de votre corps désigne le rotor du moteur tandis que le bas de votre corps désigne le stator du moteur.
Essentiellement, dans les roues de réaction, lorsque le rotor d'un moteur (attaché à la roue) tourne dans le sens des aiguilles d'une montre, le stator du moteur (attaché au reste du Wheelbot) tourne dans le sens inverse des aiguilles d'une montre. Les robots qui s'équilibrent à l'aide d'une roue de réaction diffèrent des robots qui ont recours à des gyroscopes pour l'équilibrage. Dans un gyroscope, une roue à rotation rapide est mise en rotation orthogonale par rapport à son sens de rotation créant des couples d'équilibrage dus à une conservation du moment cinétique.
Dans une roue de réaction, ces effets se produisent également, mais sont minimes par rapport aux couples de réaction. Les couples de réaction sont créés directement à l'intérieur de la roue et pointent parallèlement au sens de rotation de la roue.
Crédit :Geist et al.
"Pendant l'auto-érection, les couples de réaction doivent faire pivoter le Wheelbot de 90 degrés", a expliqué Geist. "Pendant la manœuvre, le moteur du Wheelbot consomme 16 ampères à 24 volts. Pour un grand robot de 22 cm (8,7 pouces), les moteurs sont en fait assez puissants, nous obligeant à utiliser un contrôleur de moteur conçu sur mesure, car les contrôleurs de moteur disponibles dans le commerce étaient soit trop grand ou ne pouvait pas gérer suffisamment de courant à la tension donnée."
À une consommation de courant de 16 ampères, les chercheurs ont découvert que le moteur entraînant le Wheelbot atteignait sa limite de vitesse en seulement 0,25 seconde. En raison de cette limitation et d'autres défis généralement rencontrés lors de la construction de monocycles à roue de réaction, Geist et ses collègues ont décidé de concevoir une conception entièrement nouvelle pour leur robot.
"Tout d'abord, nous avons décidé que le robot devait être symétrique, ce qui réduisait efficacement le nombre de pièces différentes à imprimer et permettait au Wheelbot d'utiliser n'importe laquelle de ses roues comme roue roulante", a déclaré Geist. "La symétrie présente l'avantage supplémentaire que la roue supérieure doit être considérablement plus petite par rapport aux robots monocycle existants, ce qui réduit son inertie de rotation dans le sens du lacet. Deuxièmement, nous avons conçu les dimensions du robot pour minimiser le couple requis pour l'auto-érection."
Lors des premiers tests, les chercheurs ont découvert que la version standard de leur robot pouvait sauter sur ses roues depuis n'importe quelle position initiale en deux étapes. Cela permet au robot de décélérer sa roue de réaction avant de terminer la deuxième et dernière étape (c'est-à-dire se repousser). '
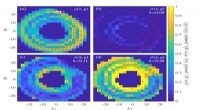
En plus de créer un prototype de leur robot, Geist et ses collègues ont également créé un estimateur d'état personnalisé, un algorithme qui peut estimer les angles de roulis et de tangage du robot. Ce système tire ses estimations des mesures des quatre unités de mesure inertielle (IMU) et des encodeurs de roue du robot, qui ne sont basées que sur les connaissances préalables et disponibles sur le soi-disant modèle cinématique du robot (c'est-à-dire une description mathématique de la position du robot le centre de masse).
"Nous pensons que dans le cas des robots à roues (y compris les Ballbots), l'estimateur proposé constitue une alternative intéressante aux autres algorithmes d'estimation tels que le filtrage de Kalman", a déclaré Geist. "Le Wheelbot démontre qu'un choix concis des dimensions et du matériel d'un robot monocycle à roue de réaction offre un banc d'essai polyvalent pour le contrôle de la robotique."

Crédit :Geist et al.
Geist et ses collègues ont été les premiers à créer un robot monocycle capable de sauter efficacement sur ses roues depuis n'importe quelle position initiale. Leur article est donc une contribution importante au domaine de la robotique, car il résout les défis électroniques et mécaniques généralement rencontrés lors de la création de ce nouveau type de monocycles à roue de réaction.
"En plus d'être un banc d'essai difficile pour le contrôle des robots, nous voyons un grand potentiel pour le Wheelbot en tant que plate-forme éducative initiant les étudiants à la robotique", a déclaré Geist. "A cet égard, le Wheelbot est un exemple typique pour démontrer la nature interdisciplinaire de la robotique. Outre sa conception mécanique nécessitant une modélisation et une simulation de la dynamique assez intéressante du robot, la forte consommation de courant de ses moteurs pose des défis importants sur sa conception électronique."
À l'avenir, le Wheelbot pourrait être utilisé à la fois dans des contextes éducatifs et de recherche pour tester des réseaux de contrôle robotique, des algorithmes d'apprentissage automatique et d'autres modèles. Un avantage clé du robot est que son fonctionnement ne nécessite qu'une connaissance de base en génie logiciel, ce qui en fait une plate-forme expérimentale idéale pour les étudiants et ingénieurs faisant leurs premiers pas en robotique.
Les chercheurs de l'équipe de Trimpe travaillent désormais sur une nouvelle version de leur robot, baptisée Wheelbot v3. L'un des principaux objectifs est de rendre le robot encore plus accessible, afin qu'il soit plus facile à construire, à utiliser et à expérimenter.
"La prochaine version du Wheelbot sera un peu plus petite que la version actuelle, utilise un microcontrôleur plus puissant et, en termes de conception de micrologiciel, est plus facile à utiliser", a ajouté Geist. "De plus, nous travaillons actuellement sur un algorithme de contrôle qui dirige le Wheelbot le long d'une trajectoire prédéfinie. Après avoir construit le premier robot monocycle à roue de réaction sautante, nous sommes ravis de démontrer que le Wheelbot est également capable d'effectuer des manœuvres de conduite agiles."
© 2022 Réseau Science X Une voiture à roues, un quadrupède et un robot humanoïde :Swiss-Mile Robot de l'ETH Zurich