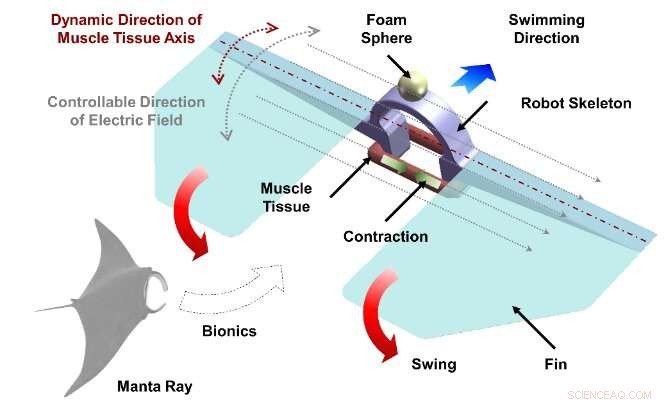
Ce nageur bio-syncrétique était composé d'une structure squelettique, de deux nageoires, d'un actionneur vivant et d'une microsphère d'équilibre en mousse. Crédit :Chuang Zhang, Institut d'automatisation de Shenyang, Académie chinoise des sciences
La nature a apporté un grand soutien au développement des robots. Inspirée par les raies manta, une équipe du State Key Laboratory of Robotics de l'Institut d'automatisation de Shenyang de l'Académie chinoise des sciences a mis au point un robot nageur bionique actionné par des tissus musculaires squelettiques cultivés et contrôlé par des électrodes multiples circulaires distribuées (CDME) . Le robot peut être propulsé efficacement par un seul tissu musculaire.
La biomimétique est l'une des méthodes de recherche robotique les plus importantes, qui peut améliorer les performances cinématiques des robots en imitant la structure et le comportement des organismes naturels. Le robot bio-syncrétique, qui utilise des matériaux biologiques naturels comme élément central, est le développement ultérieur de la bionique.
Certaines cellules vivantes ont été utilisées pour réaliser certaines fonctions des robots, notamment la détection, le contrôle et l'actionnement. Cependant, des méthodes de propulsion et de contrôle innovantes sont nécessaires pour développer davantage les performances de mouvement contrôlables des robots bio-syncrétiques. Pour résoudre ce problème, les chercheurs ont proposé une méthode de contrôle dynamique basée sur CDME. La recherche a été publiée dans la revue Cyborg and Bionic Systems .
L'équipe a découvert que le champ électrique généré par le CDME était moins nocif pour le milieu de culture et les cellules que les électrodes conventionnelles. En utilisant cette méthode, la direction du champ électrique généré par l'électrode pourrait être contrôlée dynamiquement, en la maintenant parallèle au tissu moteur du robot en temps réel, assurant ainsi un contrôle stable du robot.
Tout d'abord, l'équipe a conçu le squelette du robot en se basant sur la structure de la raie manta et a utilisé du polydiméthylsiloxane (PDMS) comme matériau principal pour la structure. Parallèlement, pour faciliter l'assemblage du tissu moteur et de la structure du robot, les chercheurs ont choisi le tissu en forme d'anneau fabriqué par les myoblastes comme unité d'entraînement du robot.
De plus, pour obtenir des tissus musculaires circulaires avec une contractilité efficace, une stimulation électrique rotationnelle du CDME a été utilisée pour réaliser une induction uniforme des myoblastes pour se différencier en myotubes. Pour permettre au robot de nager à une vitesse souhaitée, la contractilité du tissu musculaire a été mesurée avant l'assemblage avec la structure du nageur. L'équipe de recherche a également utilisé des méthodes de simulation pour analyser la relation entre les performances de mouvement du robot et la force de contraction des tissus moteurs.
Enfin, pour démontrer le mouvement stable et contrôlable du robot bio-syncrétique proposé, les chercheurs ont réalisé la nage contrôlable du robot à différentes vitesses en utilisant la méthode de stimulation électrique dynamique proposée. Dans l'expérience, le robot a démontré une nage efficace et une contrôlabilité stable, ce qui a vérifié l'efficacité de la conception biomimétique et de la méthode de contrôle basée sur CDME proposée par l'équipe de recherche.
La conception biomimétique et la méthode de contrôle d'actionnement proposées dans cette étude favorisent non seulement le développement ultérieur de robots bio-syncrétiques, mais ont également une certaine importance directrice pour la conception biomimétique de robots mous, l'ingénierie des tissus musculaires et d'autres domaines connexes.
Cependant, bien que les robots bio-syncrétiques actuels aient atteint un mouvement contrôlé efficace, il reste encore de nombreux goulots d'étranglement clés qui doivent être surmontés. Par exemple, la plupart des robots mesurent des centimètres, ce qui est difficile pour des applications telles que l'administration de médicaments in vivo.
Les technologies telles que l'impression 3D et la manipulation flexible orientées vers les structures micro-nano biologiques sont essentielles au développement de micro-robots bio-syncrétiques pour des applications cliniques et d'autres environnements spéciaux. De plus, la plupart des robots bio-syncrétiques existants s'appuient sur des stimuli artificiels externes pour réaliser des mouvements contrôlés, qui peuvent manquer d'autonomie. Par conséquent, la méthode de détection et de contrôle basée sur des cellules vivantes peut être appliquée à la recherche de robots bio-syncrétiques afin de réaliser un mouvement de robot autonome basé sur des informations environnementales. Une méthode inspirée du castor pour guider les mouvements d'un robot nageur unijambiste