Un nouveau robot de la taille d'un insecte créé par des chercheurs de l'Université de Californie, Berkeley, se précipite à la vitesse d'un cafard et peut supporter le poids d'un humain. Crédit :UC Berkeley photo par Stephen McNally
Si la vue d'un insecte qui sautille vous fait vous tortiller, vous voudrez peut-être détourner le regard :un nouveau robot de la taille d'un insecte créé par des chercheurs de l'Université de Californie, Berkeley, peut se précipiter sur le sol à presque la vitesse d'un cafard fougueux.
Et c'est presque aussi robuste qu'un cafard, trop. Essayez d'écraser ce robot sous votre pied, et plus que probablement, ça va continuer.
"La plupart des robots à cette petite échelle sont très fragiles. Si vous marchez dessus, vous détruisez à peu près le robot, " dit Liwei Lin, professeur de génie mécanique à l'UC Berkeley et auteur principal d'une nouvelle étude décrivant le robot. "Nous avons découvert que si nous pesions sur notre robot, il fonctionne encore plus ou moins."
Petit, des robots durables comme ceux-ci pourraient être avantageux dans les missions de recherche et de sauvetage, serrant et écrasant dans des endroits où les chiens ou les humains ne peuvent pas s'adapter, ou là où il peut être trop dangereux pour eux d'aller.
"Par exemple, si un tremblement de terre se produit, c'est très dur pour les grosses machines, ou les gros chiens, trouver la vie sous les débris, c'est pourquoi nous avons besoin d'un robot de petite taille, agile et robuste, " dit Yichuan Wu, premier auteur de l'article, qui a terminé ses travaux en tant qu'étudiant diplômé en génie mécanique à l'UC Berkeley dans le cadre du partenariat Tsinghua-Berkeley Shenzhen Institute. Wu est maintenant professeur adjoint à l'Université des sciences et technologies électroniques de Chine.
L'étude paraît aujourd'hui (mercredi, 31 juillet) dans le journal Robotique scientifique .
Le robot, qui a à peu près la taille d'un grand timbre-poste, est constitué d'une feuille mince d'un matériau piézoélectrique appelé polyfluorure de vinylidène, ou PVDF. Les matériaux piézoélectriques sont uniques, en ce que leur application d'une tension électrique provoque la dilatation ou la contraction des matériaux.
Les chercheurs ont enduit le PVDF d'une couche d'un polymère élastique, ce qui fait plier toute la feuille, au lieu de s'étendre ou de se contracter. Ils ont ensuite ajouté une patte avant pour que, lorsque le matériau se plie et se redresse sous un champ électrique, les oscillations propulsent l'appareil vers l'avant dans un mouvement de « saute-mouton ».

Le robot est construit d'un matériau en couches qui se plie et se redresse lorsque la tension alternative est appliquée, l'amenant à bondir vers l'avant dans un mouvement de « saute-mouton ». Crédit :UC Berkeley photo par Stephen McNally
Le robot résultant peut être simple à regarder, mais il a des capacités remarquables. Il peut naviguer le long du sol à une vitesse de 20 longueurs de corps par seconde, un taux comparable à celui d'un cafard et signalé comme le rythme le plus rapide parmi les robots à écailles d'insectes. Il peut passer à travers des tubes, gravir de petites pentes et transporter de petites charges, comme une cacahuète.
Peut-être le plus impressionnant, le robot, qui pèse moins d'un dixième de gramme peut supporter un poids d'environ 60 kg, soit environ le poids d'un humain moyen, soit environ 1 million de fois le poids du robot.
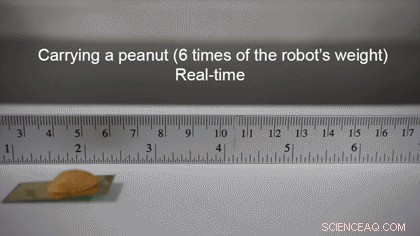
Robustesse, escalade, et transportant des charges. Crédit :Wu et al., Sci. Robot. 4, eaax1594 (2019)
"Les gens ont peut-être vécu ça, si tu marches sur le cafard, vous devrez peut-être le broyer un peu, sinon le cafard peut encore survivre et s'enfuir, " dit Lin. " Quelqu'un qui marche sur notre robot applique un poids extraordinairement grand, mais [le robot] fonctionne toujours, il fonctionne toujours. Donc, dans ce sens particulier, c'est très similaire à un cafard."
Le robot est actuellement « attaché » à un fil mince qui transporte une tension électrique qui entraîne les oscillations. L'équipe expérimente l'ajout d'une batterie pour que le robot puisse se déplacer de manière autonome. Ils travaillent également à l'ajout de capteurs de gaz et améliorent la conception du robot afin qu'il puisse être dirigé autour des obstacles.