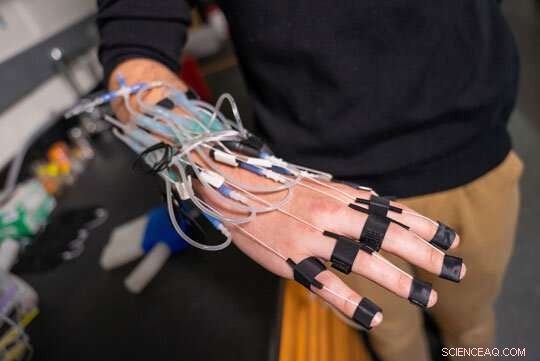
Colter Decker, étudiant à l'Université Rice, diplômé en génie mécanique, fait la démonstration d'un gant qui a été utilisé pour démontrer les caractéristiques analogiques des circuits de commande pneumatiques souples pour la robotique souple. Crédit :Brandon Martin/Rice University
Ajoutez analogique et pneumatique à la liste des options de système de contrôle pour les robots mous.
Dans une étude publiée en ligne cette semaine, des chercheurs en robotique, des ingénieurs et des spécialistes des matériaux de l'Université Rice et de l'Université Harvard ont montré qu'il est possible de fabriquer des circuits programmables non électroniques qui contrôlent les actions de robots mous en traitant des informations codées dans des bouffées d'air comprimé.
"Une partie de la beauté de ce système est que nous sommes vraiment capables de réduire le calcul à ses composants de base", a déclaré Colter Decker, premier cycle de Rice, auteur principal de l'étude dans les Proceedings of the National Academy of Sciences . Il a déclaré que les systèmes de contrôle électroniques ont été perfectionnés et affinés pendant des décennies, et que la recréation de circuits informatiques "avec des analogues à la pression et au débit au lieu de la tension et du courant" a facilité l'intégration du calcul pneumatique.
Decker, un senior spécialisé en génie mécanique, a construit son système de contrôle robotique doux principalement à partir de matériaux de tous les jours comme des pailles en plastique et des élastiques. Malgré sa simplicité, des expériences ont montré que les portes logiques pneumatiques du système pouvaient être configurées pour effectuer des opérations appelées fonctions booléennes qui sont la viande et les pommes de terre de l'informatique moderne.
"L'objectif n'a jamais été de remplacer entièrement les ordinateurs électroniques", a déclaré Colter. Il a déclaré qu'il existe de nombreux cas où les robots mous ou les appareils portables n'ont besoin d'être programmés que pour quelques mouvements simples, et il est possible que la technologie démontrée dans l'article "serait beaucoup moins chère et plus sûre à utiliser et beaucoup plus durable" que les commandes électroniques traditionnelles. /P>
En première année, Decker a commencé à travailler dans le laboratoire de Daniel Preston, professeur adjoint de génie mécanique à Rice. Decker a étudié les systèmes de contrôle fluidique et s'est intéressé à en créer un lorsqu'il a remporté une bourse de recherche d'été compétitive qui lui permettrait de passer quelques mois à travailler dans le laboratoire du chimiste et spécialiste des matériaux de Harvard, George Whitesides .
Le projet s'est transformé en une collaboration de plusieurs mois entre les deux groupes de recherche, et Decker avait neuf co-auteurs sur l'étude, y compris les auteurs co-correspondants Preston et Whitesides.
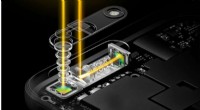
Decker et ses collègues ont créé deux composants, un actionneur en forme de piston qui traduit la pression de l'air en force mécanique et une vanne qui peut être commutée entre deux états :marche et arrêt. Les composants étaient fabriqués à partir de pièces comprenant des pailles en plastique, des tubes en plastique flexibles, des élastiques, du papier parchemin et des feuilles de polyuréthane thermoplastique qui pouvaient être collées avec une presse à chaud de bureau ou un fer chaud.
L'équipe de recherche a montré que les deux composants pouvaient être combinés dans un seul appareil, une vanne bistable qui fonctionne comme un interrupteur et utilise la pression d'air à la fois comme entrée et comme sortie. Une quantité spécifique de pression d'air est nécessaire pour basculer l'interrupteur entre les états d'arrêt et de marche. Les vannes sont maintenues fermées par des élastiques, et elles sont programmées en ajoutant ou en soustrayant des élastiques, ce qui modifie la quantité de pression requise pour l'activation. Lors de tests, Decker a montré que les circuits pouvaient être utilisés pour contrôler un robot souple en forme de main, un coussin pneumatique et un robot de la taille d'une boîte à chaussures capable de parcourir un nombre préprogrammé de pas, de récupérer un objet et de revenir à son emplacement de départ.
"La plus grande réussite de ce travail est l'incorporation de la commande numérique et analogique dans la même architecture système", a déclaré Preston. Avoir les deux signifie que les circuits de commande pneumatiques peuvent être programmés numériquement, avec les "uns et zéros auxquels vous pensez dans un ordinateur traditionnel. Mais nous pouvons également apporter des capacités analogiques, des choses qui sont continues", a-t-il déclaré. "Cela nous permet de vraiment simplifier l'architecture globale du système et d'obtenir de nouvelles fonctionnalités qui n'étaient pas accessibles dans les travaux antérieurs." Les wearables franchissent une étape "logique" vers le contrôle embarqué