Crédit :Tan et al.
Les robots auto-reconfigurables (SRR) qui peuvent automatiquement changer de forme et s'adapter à leur environnement ont récemment suscité beaucoup d'intérêt au sein de la communauté de recherche en robotique. Ces robots pourraient avoir plusieurs applications utiles, car ils peuvent acquérir une grande autonomie dans la détection de leur environnement, ainsi que dans la planification et la réalisation d'actions appropriées. Alors que des études antérieures ont introduit des méthodes pour classer ces robots en sous-groupes, il n'existe toujours pas de procédure standard pour évaluer leurs performances.
Avec ça en tête, des chercheurs de l'Université Sun Yat-sen en Chine et de l'Université de technologie et de design de Singapour ont récemment développé un cadre pour la taxonomie et l'évaluation (TAEV) des robots auto-reconfigurables. Leur étude, présenté dans Accès IEEE , a été financé par le bureau du programme national de R&D en robotique de Singapour.
"Jusque là, les chercheurs ont mis au point une approche qualitative pour classer les SRR, mais pas des méthodes quantitatives qui peuvent guider le concepteur, fabricant et utilisateur de robot, " Abdallah Aamir Hayat, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Cela nous a motivés à développer un cadre et une méthode d'évaluation pour les RRF. »
Dans les SRR, la capacité de changer de forme pour accomplir une tâche donnée dépend principalement du type de mécanismes employés par les robots et de leur niveau d'autonomie. Alors que certains systèmes SRR sont entièrement autonomes, d'autres nécessitent un certain degré de téléopération manuelle.
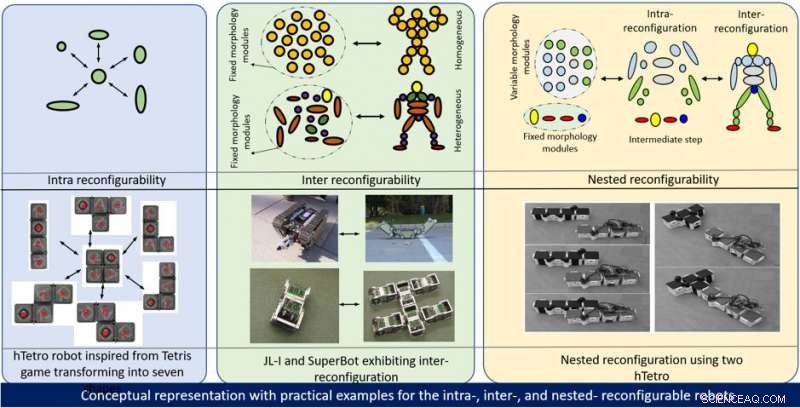
Au niveau mécanique, les robots peuvent être classés en trois grandes catégories :ceux avec un intra-, Inter-, et reconfiguration imbriquée. La différence entre intra- et inter-reconfigurations réside dans le nombre de configurations disponibles pour le robot et l'échelle de ces configurations.
La distinction entre l'intra- et l'inter-reconfigurabilité est que la première implique un seul module robotique qui peut changer de morphologie sans aucun assemblage ou démontage et la seconde implique deux ou plusieurs modules qui peuvent s'assembler ou se désassembler. L'intégration à la fois de l'inter et de l'intra donne la reconfigurabilité imbriquée. Crédit :Tan et al.
L'intra-reconfigurabilité implique un module robotique unique qui peut changer de morphologie sans aucun montage ni démontage, tandis que l'inter-reconfigurabilité implique deux modules ou plus qui peuvent s'assembler ou se désassembler. Finalement, reconfiguration imbriquée, inventé par le professeur Mohan Rajesh Elara et le professeur Kristin L. Wood, combine les caractéristiques des reconfigurations intra et inter.
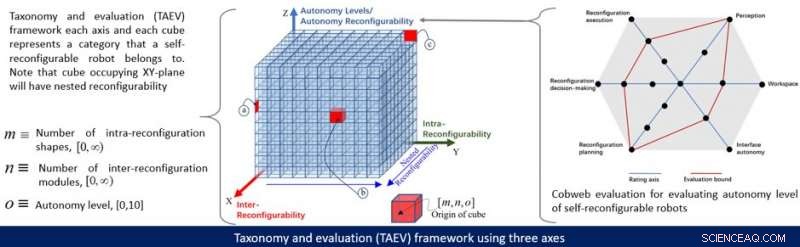
Dans leur papier, Hayat et leurs collègues ont introduit des métriques qui peuvent être utilisées pour évaluer les SRR, quantifier leur niveau d'autonomie et le nombre de configurations dont ils disposent. Ces métriques ont été combinées pour créer un cadre TAEV qui pourrait guider les chercheurs et les fabricants dans l'évaluation de leurs systèmes robotiques.
"Notre travail quantifie la reconfigurabilité des mécanismes en attribuant un indice sur la base d'un nombre de morphologie de sens et du nombre de modules impliqués, " expliqua Hayat. " Ces indices sont représentés sur les deux axes (X- et Y-) dans le cadre à trois axes. Le troisième axe (Z-) est affecté de l'indice donné par le niveau d'autonomie qui est calculé à l'aide du modèle d'évaluation de la toile d'araignée composé de six indicateurs de performance à savoir la planification de la reconfiguration, la prise de décision, autonomie des interfaces, la perception, et espace de travail."
Le principal avantage du cadre développé par Hayat et ses collègues est qu'il attribue un index unique à un SRR donné dans l'espace de taxonomie 3-D qu'ils ont décrit dans leur article. Par conséquent, il pourrait être utilisé pour concevoir des études de compromis et concevoir des approches pour évaluer ou comparer les performances de différents SRR sur la même tâche.