Le robot d'auto-équilibrage utilisé pour démontrer comment la « théorie du contrôle perceptuel » peut aider les robots à marcher d'une manière plus humaine. Crédit :Université de Manchester
Une théorie psychologique pourrait amorcer des améliorations dans la façon dont les robots sont capables de marcher, grâce à une étude de l'Université de Manchester.
L'étude, une collaboration unique entre un psychologue clinicien, ingénieurs en robotique et un entrepreneur en robotique est publié dans le Journal des systèmes intelligents et robotiques aujourd'hui.
Il a analysé ce qui se passe lorsque les algorithmes standard pilotant un robot à équilibrage automatique, fabriqués à partir de simples Lego, sont remplacés par ceux basés sur la « théorie du contrôle perceptuel ».
La théorie était encodée dans le petit droïde, lui permettant de contrôler ce qu'il ressent pour se déplacer plus efficacement, tout comme les humains et les autres animaux peuvent le faire.
Bien que le robot se déplace sur deux roues, c'est un 'pendule inversé', ce qui nécessite un équilibre agile d'une manière similaire à la façon dont notre corps est maintenu droit lorsque nous marchons.
Donc, mieux le robot peut s'équilibrer, mieux il sera préparé pour marcher comme un humain.
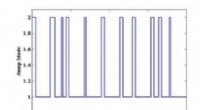
Dans l'étude, le robot plus réaliste équilibré plus précisément, plus rapidement et plus efficacement que ses concurrents en évaluant son environnement au moins 100 fois par seconde.
Il a également déménagé dans un nouvel emplacement, même lorsqu'il est dérangé par des coups de coude latéraux, plus efficacement que ses concurrents.
Lorsque l'algorithme a été programmé dans le robot, il semblait beaucoup moins stable et vacillait excessivement.