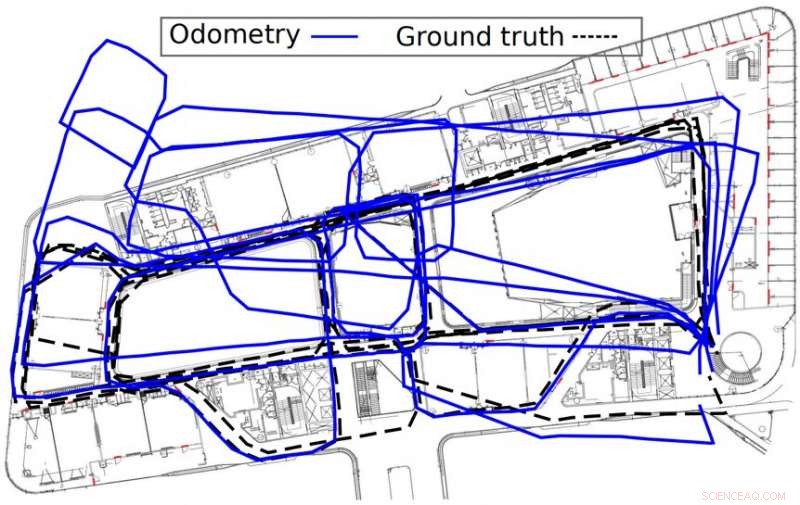
Figure montrant comment les approches de vérité terrain se comparent aux techniques d'odométrie. Crédit :Liu et al.
Dans les années récentes, des équipes de recherche du monde entier ont développé de nouvelles méthodes de localisation et de cartographie simultanées (SLAM). Ces techniques peuvent être utilisées pour construire ou mettre à jour des cartes d'un environnement donné en temps réel, tout en suivant simultanément l'emplacement d'un agent artificiel ou d'un robot dans ces cartes.
La plupart des approches SLAM existantes reposent fortement sur l'utilisation de capteurs basés sur la distance ou la vision, à la fois pour sentir l'environnement et les mouvements d'un robot. Ces capteurs, cependant, peut être très coûteux et nécessite généralement une puissance de calcul importante pour fonctionner correctement.
Conscient de ces limites, chercheurs de l'Université de technologie et de design de Singapour, Université des sciences et technologies du Sud-Ouest, l'Université de Moratuwa et l'Université technologique de Nanyang ont récemment développé une nouvelle technique de SLAM collaboratif qui repose sur des capteurs basés sur la distance ou la vision. Cette technique, présenté dans un article prépublié sur arXiv, pourrait permettre une navigation plus efficace des robots dans des environnements intérieurs inconnus à un coût nettement inférieur à celui de la plupart des méthodes proposées précédemment.
« Nous visions à utiliser des capteurs à faible coût et à faible calcul en remplacement des capteurs basés sur la portée ou sur la base visuelle, " Chau Yuen, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. « Comme les bâtiments modernes ont généralement une couverture de réseau Wi-Fi, notre objectif est d'utiliser ces informations disponibles gratuitement pour effectuer le SLAM."
Pour exploiter les fonctionnalités radio qui sont facilement disponibles dans la plupart des environnements urbains, les chercheurs ont développé une approche pour la localisation simultanée collaborative et la cartographie des empreintes digitales radio appelée C-SLAM-RF. Leur technique fonctionne en collectant des mesures Wi-Fi dans de grands environnements intérieurs, puis en utilisant ces mesures pour générer des cartes ou localiser des agents artificiels.
"Notre objectif est de générer une carte radio de l'environnement avec le moins d'effort humain possible en tirant parti des capacités de détection intégrées des téléphones intelligents couramment utilisés, " expliqua Yuen.
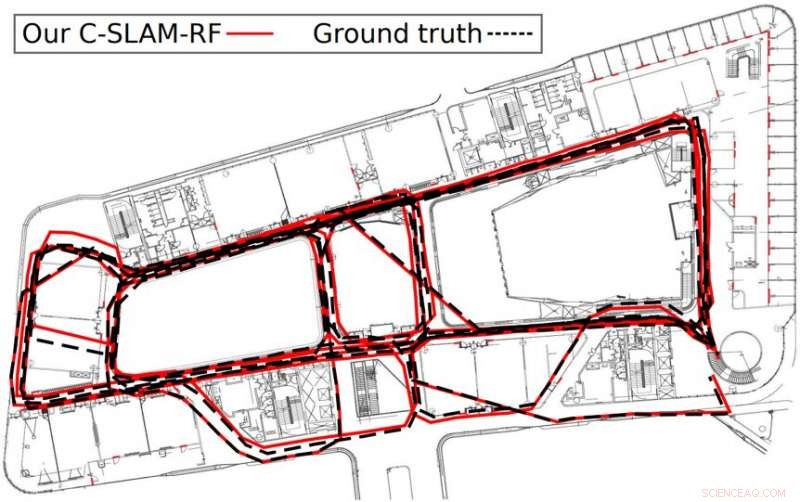
Figure montrant comment les approches de chemin estimé se comparent à la technique SLAM développée par les chercheurs. Crédit :Liu et al.
Le système développé par Yuen et ses collègues reçoit des informations sur la force du signal provenant de points d'accès Wi-Fi préexistants répartis dans un environnement donné, ainsi que des processus d'estime des piétons (PDR) (c'est-à-dire, calculs de la position actuelle de quelqu'un) dérivé d'un téléphone intelligent. Il utilise ensuite ces signaux pour construire une carte de l'environnement sans nécessiter de connaissance préalable de l'environnement ou de la répartition des points d'accès en son sein. L'outil C-SLAM-RF conçu par les chercheurs peut également déterminer si le robot est revenu à un endroit précédemment visité, connu sous le nom de "fermeture de boucle, " en évaluant la similitude entre les empreintes radio de différents signaux.
« Les approches SLAM existantes utilisent souvent des dispositifs dédiés, par exemple, des caméras visuelles ou des capteurs LIDAR à distance, mesurer la similitude des observations par correspondance de balayage ou correspondance de caractéristiques, qui sont coûteux en temps de calcul, " U-Xuan Tan, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. "Notre solution exploite la possibilité d'effectuer la localisation et la cartographie à faible coût, appareils IoT omniprésents comme les smartphones, en raison de la popularité croissante des réseaux sans fil Wi-Fi."
Yuen, Tan et ses collègues ont testé leur technique dans un environnement intérieur d'une superficie de 130 mètres x 70 mètres. Leurs résultats étaient très prometteurs, comme les performances de leur système dépassaient celles de plusieurs autres techniques existantes pour le SLAM, souvent par une marge considérable.
"Nous avons évalué notre approche dans un environnement à grande échelle et une précision de positionnement de 0,6 mètre est atteinte sans aucune connaissance préalable de l'environnement, " Ran Liu, un autre chercheur impliqué dans l'étude, a déclaré TechXplore. "Cette précision surpasse l'approche de localisation de pointe basée sur les empreintes digitales, ce qui nécessite une étude fastidieuse de l'environnement. Le temps de calcul requis par notre approche est insignifiant par rapport au SLAM basé sur la distance ou visuel."
À l'avenir, l'approche du SLAM collaboratif imaginée par cette équipe de chercheurs pourrait contribuer à améliorer la navigation des robots dans des environnements inconnus. En outre, le fait qu'il ne nécessite pas l'utilisation de capteurs coûteux et s'appuie sur des points d'accès Wi-Fi existants en fait une solution plus réalisable pour les implémentations à grande échelle.
« Nous aimerions maintenant explorer la possibilité de fusionner différents signaux radio, par exemple un signal cellulaire, pour améliorer la précision de positionnement, " Yong Liang Guan, un autre chercheur impliqué dans l'étude, a déclaré TechXplor. "Un autre plan consiste à utiliser la carte radio produite à des fins de localisation. Une combinaison avec d'autres capteurs, par exemple des télémètres laser, pour accélérer et améliorer la cartographie dans un environnement à grande échelle sera également l'une de nos futures recherches."
© 2020 Réseau Science X