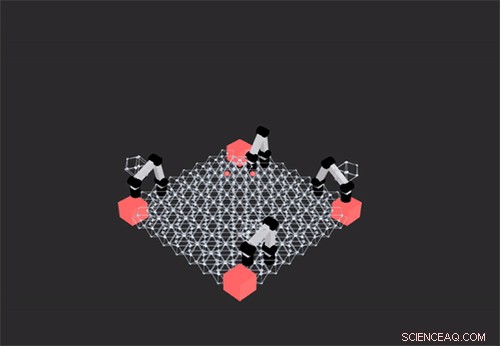
Une simulation informatique montre un groupe de quatre robots assembleurs en train de construire une structure tridimensionnelle. Des essaims entiers de ces robots pourraient être déchaînés pour créer de grandes structures telles que des ailes d'avion ou des habitats spatiaux. Crédit :Massachusetts Institute of Technology
Les avions commerciaux d'aujourd'hui sont généralement fabriqués en sections, souvent dans des endroits différents - des ailes dans une usine, sections de fuselage à une autre, composants de queue ailleurs, puis transportés vers une usine centrale dans d'énormes avions cargo pour l'assemblage final.
Mais et si l'assemblage final était le seul assemblage, avec tout l'avion construit à partir d'un large éventail de minuscules pièces identiques, tous assemblés par une armée de petits robots ?
C'est la vision que l'étudiant diplômé Benjamin Jenett, travaillant avec le professeur Neil Gershenfeld au Center for Bits and Atoms (CBA) du MIT, poursuit ses travaux de thèse de doctorat. C'est maintenant atteint le point que les versions prototypes de ces robots peuvent assembler de petites structures et même travailler ensemble en équipe pour construire des assemblages plus grands.
Le nouveau travail apparaît dans le numéro d'octobre des IEEE Robotics and Automation Letters, dans un article de Jenett, Gershenfeld, camarade étudiante diplômée Amira Abdel-Rahman, et ancien élève de l'ABC Kenneth Cheung SM '07, doctorat '12, qui est maintenant au centre de recherche Ames de la NASA, où il dirige le projet ARMADAS pour concevoir une base lunaire qui pourrait être construite avec un assemblage robotique.
"Ce papier est un régal, " dit Aaron Becker, professeur agrégé de génie électrique et informatique à l'Université de Houston, qui n'était pas associé à ce travail. "Il combine une conception mécanique de premier ordre avec des démonstrations à couper le souffle, nouveau matériel robotique, et une suite de simulation avec plus de 100, 000 éléments, " il dit.
Crédit :Massachusetts Institute of Technology
"Ce qui est au cœur de tout cela, c'est un nouveau type de robotique, que nous appelons robots relatifs, " dit Gershenfeld. Historiquement, il explique, il y a eu deux grandes catégories de robotique - celles faites de composants personnalisés coûteux qui sont soigneusement optimisés pour des applications particulières telles que l'assemblage en usine, et ceux fabriqués à partir de modules fabriqués en série bon marché avec des performances beaucoup plus faibles. Les nouveaux robots, cependant, sont une alternative aux deux. Ils sont beaucoup plus simples que les premiers, bien que beaucoup plus capable que ce dernier, et ils ont le potentiel de révolutionner la production de systèmes à grande échelle, des avions aux ponts en passant par des bâtiments entiers.
Selon Gershenfeld, la principale différence réside dans la relation entre le dispositif robotique et les matériaux qu'il manipule et manipule. Avec ces nouveaux types de robots, "vous ne pouvez pas séparer le robot de la structure - ils fonctionnent ensemble comme un système, " dit-il. Par exemple, alors que la plupart des robots mobiles nécessitent des systèmes de navigation très précis pour garder une trace de leur position, les nouveaux robots assembleurs n'ont qu'à savoir où ils se trouvent par rapport aux petites sous-unités, appelés voxels, sur lesquels ils travaillent actuellement. Chaque fois que le robot fait un pas sur le voxel suivant, il réajuste son sens de la position, toujours en relation avec les composants spécifiques sur lesquels il repose en ce moment.
La vision sous-jacente est que, tout comme les images les plus complexes peuvent être reproduites en utilisant un ensemble de pixels sur un écran, pratiquement n'importe quel objet physique peut être recréé sous la forme d'un ensemble de pièces tridimensionnelles plus petites, ou voxels, qui peuvent eux-mêmes être constitués de simples entretoises et nœuds. L'équipe a montré que ces composants simples peuvent être agencés pour répartir efficacement les charges; ils sont en grande partie constitués d'espaces ouverts afin que le poids global de la structure soit minimisé. Les unités peuvent être saisies et mises en place les unes à côté des autres par de simples assembleurs, puis attachés ensemble à l'aide de systèmes de verrouillage intégrés dans chaque voxel.
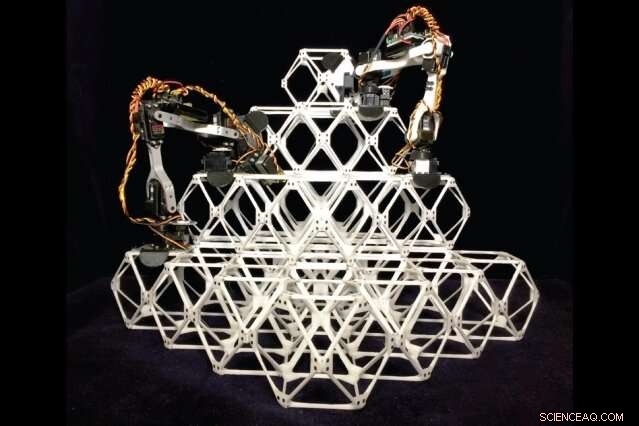
La photo montre deux prototypes de robots assembleurs au travail pour assembler une série de petites unités, connu sous le nom de voxels, dans une structure plus vaste. Crédit :Benjamin Jenett
Les robots eux-mêmes ressemblent à un petit bras, avec deux longs segments articulés au milieu, et des dispositifs de serrage sur les structures de voxels à chaque extrémité. Les appareils simples se déplacent comme des vers en pouces, avancer le long d'une rangée de voxels en ouvrant et en fermant à plusieurs reprises leurs corps en forme de V pour passer de l'un à l'autre. Jenett a surnommé les petits robots BILL-E (un clin d'œil au robot de cinéma WALL-E), qui signifie Bipedal Isotropic Lattice Locomoting Explorer.
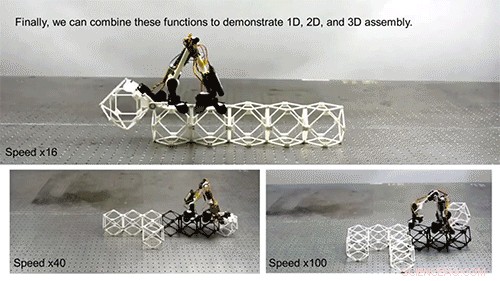
Jenett a construit plusieurs versions des assembleurs comme modèles de preuve de concept, ainsi que des conceptions de voxels correspondantes dotées de mécanismes de verrouillage pour attacher ou détacher facilement chacun de ses voisins. Il a utilisé ces prototypes pour démontrer l'assemblage des blocs en linéaire, bidimensionnel, et des structures tridimensionnelles. "On ne met pas la précision dans le robot, la précision vient de la structure" au fur et à mesure qu'elle prend forme, dit Jenett. "C'est différent de tous les autres robots. Il a juste besoin de savoir où se trouve sa prochaine étape."
Pendant qu'il travaille sur l'assemblage des pièces, chacun des petits robots peut compter ses pas sur la structure, dit Gershenfeld, qui est le directeur de l'ABC. En plus de la navigation, cela permet aux robots de corriger les erreurs à chaque étape, éliminant la plupart de la complexité des systèmes robotiques typiques, il dit. "Il manque la plupart des systèmes de contrôle habituels, mais tant qu'il ne manque pas une étape, il sait où il se trouve." Pour les applications d'assemblage pratiques, des essaims de telles unités pourraient travailler ensemble pour accélérer le processus, grâce à un logiciel de contrôle développé par Abdel-Rahman qui peut permettre aux robots de coordonner leur travail et d'éviter de se gêner les uns les autres.
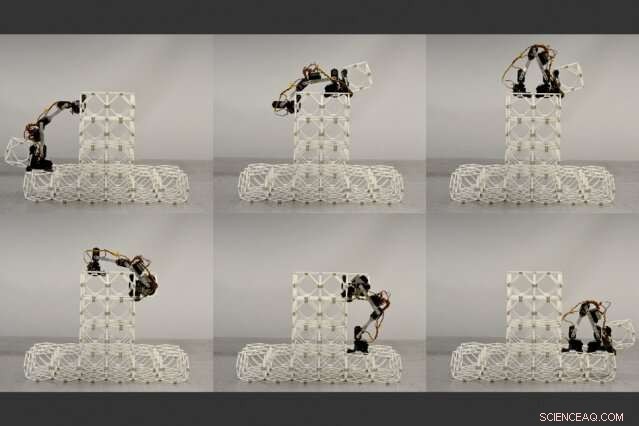
La séquence de photos montre un robot assembleur au travail, transporter une unité structurelle au-dessus et de l'autre côté d'une structure en construction. Crédit :Benjamin Jenett
Ce type d'assemblage de grandes structures à partir de sous-ensembles identiques à l'aide d'un système robotique simple, un peu comme un enfant assemblant un grand château avec des blocs LEGO, a déjà suscité l'intérêt de quelques grands utilisateurs potentiels, dont la NASA, collaborateur du MIT sur cette recherche, et la société aérospatiale européenne Airbus SE, qui a également aidé à parrainer l'étude.
Un avantage d'un tel assemblage est que les réparations et la maintenance peuvent être facilement gérées par le même type de processus robotique que l'assemblage initial. Les sections endommagées peuvent être démontées de la structure et remplacées par de nouvelles, produire une structure tout aussi robuste que l'originale. "Déconstruire est aussi important que construire, " dit Gershenfeld, et ce processus peut également être utilisé pour apporter des modifications ou des améliorations au système au fil du temps.
"Pour une station spatiale ou un habitat lunaire, ces robots vivraient sur la structure, l'entretenir et le réparer en permanence, " dit Jenet.
Finalement, de tels systèmes pourraient être utilisés pour construire des bâtiments entiers, surtout dans des environnements difficiles comme dans l'espace, ou sur la lune ou sur Mars, dit Gershenfeld. Cela pourrait éliminer le besoin d'expédier de grandes structures pré-assemblées depuis la Terre. Au lieu de cela, il pourrait être possible d'envoyer de gros lots de minuscules sous-unités ou de les former à partir de matériaux locaux à l'aide de systèmes capables de lancer ces sous-unités à leur point de destination final. "Si vous pouvez faire un gros porteur, vous pouvez faire un bâtiment, " dit Gershenfeld.
Sandor Fekete, directeur de l'Institut des systèmes d'exploitation et des réseaux informatiques de l'Université technique de Braunschweig, en Allemagne, qui n'a pas participé à ce travail, dit "Ultra-léger, des matériaux numériques tels que [ces] ouvrent des perspectives étonnantes pour la construction efficace, complexe, des ouvrages de grande envergure, qui sont d'une importance vitale dans les applications aérospatiales.
Mais assembler de tels systèmes est un défi, dit Fekete, qui envisage de se joindre à l'équipe de recherche pour poursuivre le développement des systèmes de contrôle. « C'est là que l'utilisation de robots petits et simples promet de fournir la prochaine avancée :les robots ne se fatiguent pas ou ne s'ennuient pas, et l'utilisation de nombreux robots miniatures semble être le seul moyen d'accomplir ce travail essentiel. Cette œuvre extrêmement originale et astucieuse de Ben Jennet et de ses collaborateurs fait un pas de géant vers la construction d'ailes d'avion à réglage dynamique, d'énormes voiles solaires ou même des habitats spatiaux reconfigurables."
Dans le processus, Gershenfeld dit, "nous avons l'impression de découvrir un nouveau domaine de systèmes hybrides matériau-robot."
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.