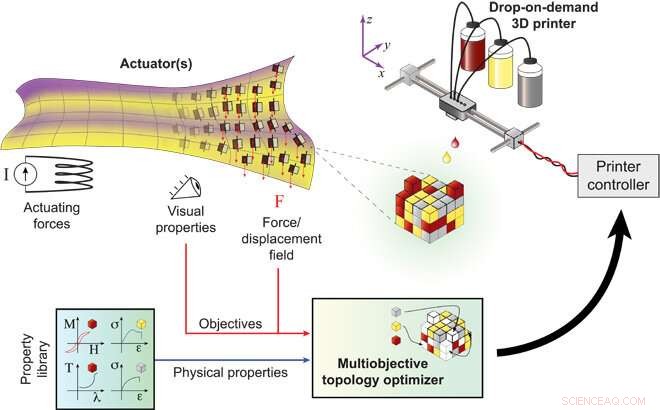
Présentation du processus d'impression 3D piloté par les spécifications. La structure des actionneurs individuels (ou l'agencement de plusieurs actionneurs) est optimisée à l'aide d'un processus d'optimisation de topologie multi-objectifs. Noter que, en général, la structure optimisée finale peut être de n'importe quelle forme arbitraire comme indiqué. L'optimisation utilise les propriétés physiques globales des matériaux individuels et les objectifs fonctionnels comme entrées. La représentation optimisée générée à base de voxels de la structure est utilisée par l'imprimante pour fabriquer la structure optimisée à l'aide d'un processus d'impression à jet d'encre à la demande. Cela permet de générer et de fabriquer automatiquement des conceptions de grande dimension avec une intervention humaine minimale. Dans ce travail, un polymère acrylique rigide (RIG), un polymère acrylate élastique (ELA), et un composite nanoparticule magnétique (Fe3O4)/polymère (MPC) sont les principaux matériaux utilisés. Le contraste dans l'optique, mécanique, et les propriétés magnétiques sont utilisées pour optimiser simultanément l'apparence visuelle et les forces d'actionnement tout en générant la conception au niveau du voxel. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaw1160
En science des matériaux et en physique appliquée, les chercheurs s'attendent à ce que les systèmes d'actionnement fonctionnent de la même manière que les phénomènes naturels. A titre d'exemple classique, les scientifiques ont proposé de concevoir des matériaux bio-inspirés imitant le camouflage de la seiche, bien que l'ingénierie de ces systèmes hautement intégrés puisse être difficile en raison de la complexité combinée de la génération de conceptions architecturales de grande dimension et de matériaux multifonctionnels associés à leur processus de fabrication. Dans un récent rapport sur Avancées scientifiques , Subramanian Sundaram et ses collègues des départements d'informatique, l'intelligence artificielle et le génie électrique aux États-Unis et en France ont présenté un protocole complet sur l'optimisation de la topologie multi-objectifs et l'impression tridimensionnelle (3-D) multimatériaux à la demande pour concevoir des actionneurs complexes.
Les actionneurs contenaient des polymères souples et rigides couplés à un composite nanoparticule/polymère magnétique qui répondait à un champ magnétique. L'optimiseur de topologie pourrait attribuer des matériaux à des voxels individuels afin d'améliorer l'apparence physique haute résolution. Lorsqu'ils ont unifié la stratégie de conception optimisée de la topologie avec le processus de fabrication multimatériaux, Sundaram et al. pourrait concevoir des actionneurs complexes comme une voie prometteuse vers une fabrication automatisée et axée sur les objectifs.
Les robots modernes nécessitent des actionneurs qui intègrent plusieurs fonctions ensemble dans un seul boîtier pour une hauteur optimisée, efficacité énergétique, topologie, taille et d'autres mesures de performance. Cette idée sous-tend les propositions de recherche qui préconisent l'intégration étroite de la détection, actionnement et calcul avec des matériaux robotiques. Les chercheurs débattent encore pour savoir si les robots seront des corps avec des cerveaux ou des cerveaux avec des corps et donc une distinction entre les matériaux et les machines reste à établir. Le nouveau paradigme avec les matériaux robotiques nécessite que les pièces du robot soient conçues pour de multiples fonctions et optimisées pour de multiples objectifs comme avec les organismes naturels.
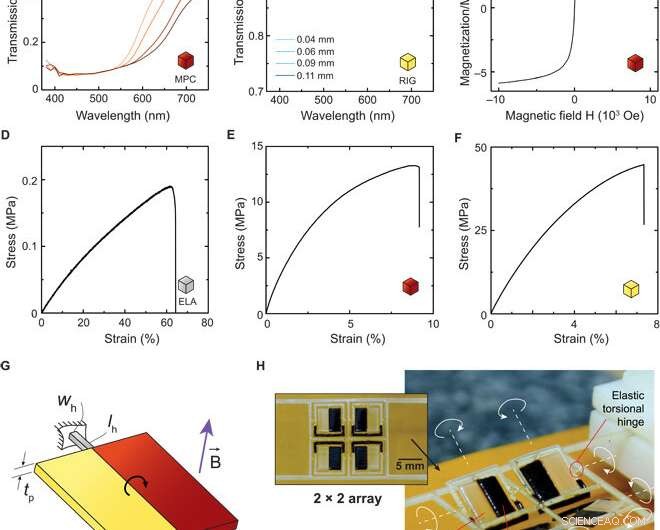
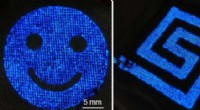
Bibliothèque de propriétés de matériaux. (A) La transmission à travers le MPC montrée en fonction de la longueur d'onde pour des films d'épaisseur variable, mesuré à l'aide d'un spectrophotomètre. (B) La transmission à travers le matériau rigide transparent indiqué en fonction de la longueur d'onde pour plusieurs épaisseurs de film. (C) Magnétisation par rapport au champ magnétique appliqué pour le MPC mesuré à température ambiante. Les nanoparticules magnétiques représentent ∼12% du poids total du MPC. Courbes contraintes-déformations mécaniques typiques pour l'ELA, MPC, et le polymère rigide (RIG) sont représentés en (D) à (F), respectivement. Modules d'élasticité des polymères aux déformations linéaires, en moyenne à partir de trois échantillons chacun, varient considérablement - ELA (528 kPa), MPC (507 MPa), et RIG (1290 MPa). (G) Le schéma montre la conception fondamentale à base de charnière avec la longueur du panneau lp et l'épaisseur tp. Dans cette conception, le panneau est divisé en deux parties égales de RIG et de MPC. Le panneau est fixé à des limites rigides sur deux côtés avec des charnières de torsion ELA de longueur lh, largeur wh, et épaisseur ép. Lors de l'application d'un champ magnétique, la partie magnétique du panneau génère un couple. Ceci est utilisé comme bloc fondamental dans les échantillons conçus manuellement. (H) Image d'un tableau 2 × 2 de panneaux chacun avec deux axes de rotation. Les régions marron foncé de l'image montrent le matériau MPC, et les parties translucides montrent les matériaux rigides. Les charnières de torsion élastiques sont presque identiques au polymère rigide en apparence. Lors de l'application d'un champ magnétique, chaque panneau présente une combinaison unique de rotations angulaires à deux axes. La vue de dessus de l'échantillon plat tel qu'imprimé est montrée sur la gauche. (Crédit photo :S.S. et D.S.K., MIT.) Crédit:Science Advances, doi:10.1126/sciadv.aaw1160
Le défi de la reproduction des systèmes multifonctionnels bioinspirés reste sur la conception des systèmes d'actionnement. Dans l'exemple classique d'un système d'actionnement d'une seiche, le contrôle simultané des déflexions physiques et de l'apparence haute résolution permet un camouflage biologique efficace. Reproduire un tel actionnement intégré de manière transparente en laboratoire est fastidieux en raison de la complexité de la création d'un espace de conception de grande dimension et de la fabrication de ces conceptions avec de nouveaux matériaux et des géométries de forme libre.
Dans les exemples contemporains de systèmes d'actionnement, les scientifiques des matériaux ont développé un dispositif de micromiroir numérique avec des millions d'actionneurs identiques et un système de stockage de données à haute densité « mille-pattes » avec des porte-à-faux du système microélectromécanique. Optimiser ces systèmes d'actionnement pour la consommation d'énergie, la faible empreinte et la fiabilité des processus prennent du temps, tandis que les réseaux d'actionneurs non uniformes présentaient une complexité supplémentaire en laboratoire. Comme alternative prometteuse, Les techniques d'optimisation de la topologie offrent des dispositions de matériaux automatiquement optimisées dans un espace de conception donné.
Dans le travail present, Sundaram et al. a utilisé une stratégie de recuit simulé précédemment utilisée comme approche d'optimisation de la topologie réussie pour concevoir des structures en treillis. Bien que très générique en théorie, l'approche tenait compte des spécificités du problème pour être efficace dans la pratique. Dans la présente approche, Sundaram et al. pris en compte le rôle des matériaux, où la technique était entièrement consciente de la fabrication. L'étude proposée sur une haute résolution, Le cadre d'optimisation de topologie multiphysique et sensible à la fabrication est une première stratégie mise en œuvre dans le présent travail.
Les scientifiques ont utilisé un processus de fabrication de précision capable de gérer des conceptions de grande dimension pour fabriquer l'actionneur synthétique. Après, ils ont choisi une approche de fabrication additive 3-D rapide pour la fabrication d'actionneurs afin de produire des structures complexes avec des matériaux divers. L'intérêt croissant pour les actionneurs imprimés en 3D est dû à leur vitesse et à leur applicabilité en robotique à micro/mésoéchelle.
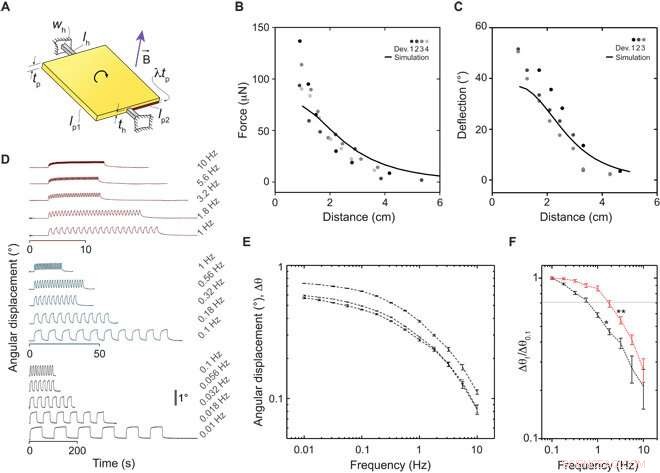
Caractéristiques de l'actionneur—Forces, déplacements, et la bande passante d'actionnement. (A) Pour caractériser les performances de l'actionneur, les scientifiques ont utilisé la conception fondamentale avec un petit changement. Ici, seulement une fraction de l'épaisseur du panneau, tp, est rempli de MPC, noté . Les résultats suivants ont été obtenus avec un panneau rectangulaire de taille lp1 × lp2 =8 mm × 9 mm, épaisseur tp =1 mm, =0,15, et charnières de dimensions Wh =0,5 mm, lh =1 mm, et th =0,25 mm. (B) Forces de blocage mesurées de quatre dispositifs identiques montrés en fonction de la distance de l'aimant 2″ par 2″ par 0,5″ avec les résultats de simulation correspondants. (C) Déflexions angulaires mesurées de trois dispositifs identiques en fonction de la distance par rapport à l'aimant. (D) Déplacements angulaires suivis optiquement en fonction du temps pour l'actionnement à des fréquences de 0,01 à 10 Hz. (E) Amplitudes de déplacement angulaire en fonction de la fréquence pour trois appareils. (F) La bande passante apparente de grande amplitude dépend de la configuration du champ magnétique puisque la force subie par l'actionneur lui-même varie avec le déplacement. Ceci est mis en évidence dans ce graphique avec deux cas - dans un cas, la force subie par l'actionneur augmente de façon monotone avec le déplacement angulaire (⋆), et dans l'autre cas, il y a un déplacement angulaire stable lorsque le panneau s'aligne avec la direction du gradient maximum (⋆⋆). Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaw1160
Les scientifiques avaient déjà exploré la propriété de l'actionnement magnétique pour la matière molle en raison d'une mise à l'échelle favorable, densité de force d'actionnement élevée et actionnement sans attache. Sundaram et al. unifié une technique d'optimisation évolutive biomimétique avec un processus automatisé de fabrication additive multimatériaux pour concevoir et fabriquer rapidement des actionneurs de grande dimension dans le présent travail. L'approche pourrait éventuellement permettre la fabrication entièrement automatisée de conceptions de grande dimension, qui est un objectif à long terme en robotique.
Les chercheurs ont mis en œuvre le processus d'impression 3D personnalisé à la demande pour optimiser l'ensemble du pipeline de fabrication et effectuer des améliorations tenant compte de la fabrication. Ils ont conçu un actionneur spécifique dans un plan, structure rigide avec des cellules synthétiques remplies d'un polymère rigide transparent ou d'un polymère sombre magnétiquement sensible. L'optimiseur de topologie contrôlait le placement des deux matériaux par rapport à leurs propriétés matérielles pour des applications optimales. Sundaram et al. puis a combiné un processus d'impression 3D multimatériaux personnalisé à la demande avec une optimisation de la topologie multi-objectifs pour concevoir les conceptions d'actionneurs de grande dimension en laboratoire. Ils ont créé un ensemble d'encres durcissables aux ultraviolets (UV) avec une variété d'effets, notamment optiques, propriétés magnétiques et mécaniques, puis caractérisé les échantillons pour générer une bibliothèque de propriétés.
Le nénuphar imprimé est placé aux interfaces fluides et actionné à l'aide d'un aimant permanent. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaw1160
Les scientifiques ont utilisé une imprimante 3D multimatériau à jet d'encre sur mesure. Ils ont utilisé un polymère d'acrylate rigide (RIG), un polymère acrylate élastique (ELA) et un composite polymère nanoparticulaire magnétique (MPC) ainsi que des encres de départ optimisées pour le processus d'impression à jet d'encre. Après dépôt d'encre, ils ont utilisé un réseau de diodes électroluminescentes (DEL) pour réticuler l'encre par photopolymérisation à radicaux libres. Les trois matériaux contenaient des modules d'élasticité et des propriétés matérielles très variables, leur permettant de fabriquer des joints souples et des structures rigides à utiliser comme actionneurs. Les scientifiques ont démontré leurs capacités et fabriqué une variété de réseaux d'actionneurs multimatériaux conçus manuellement. Ils ont fait fonctionner les actionneurs conçus et fabriqués pendant au moins 1 000 cycles sans dégradation des performances.
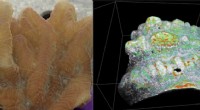
Sundaram et al. ont étudié les applications d'actionneurs magnétiques doux à base de multimatériaux imprimés en 3D à l'aide d'un électro-aimant alimenté par une source de courant pour générer un champ magnétique réglable. Comme preuve de concept, ils ont développé quatre pétales individuels pour l'actionnement magnétique sur une interface air-eau, où les pétales ont fait surface à partir de l'interface de l'eau. Pour un actionnement répétable, ils ont placé les échantillons imprimés à une interface huile de silicone-eau. Ces exemples conçus manuellement ont été une première à mettre en évidence la fabrication additive multimatériaux couplée à l'actionnement magnétique. La stratégie a intégré de manière transparente l'impression multimatériaux et l'optimisation de la topologie pour démontrer propriétés optiques à haute résolution.
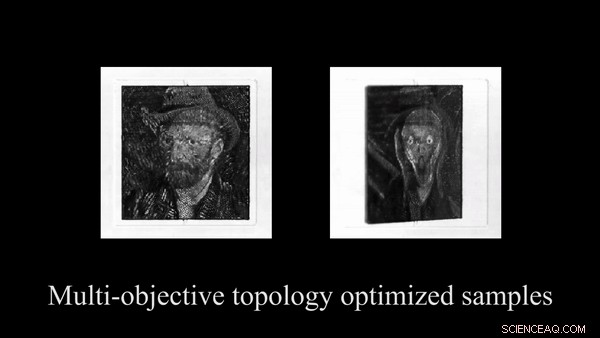
Optimisation de la topologie des actionneurs. Crédit :Avancées scientifiques, doi:10.1126/sciadv.aaw1160
Les scientifiques ont optimisé la topologie multi-objectifs à l'aide d'un logiciel de simulation pour comprendre la distribution des cellules MPC (Magnetic nanoparticle polymer composite) pour l'actionnement magnétique. Ils ont ensuite appliqué la méthode à deux images différentes de peintures qui comprenaient un autoportrait de Van Gogh et le "Scream" de Munch. Après avoir appliqué le cadre d'optimisation de la topologie, ils contrôlaient l'actionnement magnétique avec un champ magnétique appliqué pour faire passer progressivement les images du portrait de Van Gogh au portrait de Munch en augmentant les angles d'inclinaison/déviation. Les scientifiques ont ensuite caractérisé l'actionneur optimisé pour la topologie avec des tests à long terme.
De cette façon, Subramanian Sundaram et ses collègues ont développé un optimiseur de topologie pour faire correspondre les propriétés optiques de la cible et ses angles d'inclinaison. Les scientifiques ont en outre couplé une impression 3D à jet d'encre à la demande avec la technique d'optimisation pour concevoir des conceptions optimisées pour la topologie et générer des propriétés optiques haute résolution. Bien que des défis existent dans le développement de nouvelles encres et matériaux, ils pourraient fabriquer une large gamme de matériaux en utilisant le processus.
Les chercheurs peuvent concevoir l'ensemble du pipeline de fabrication pour une liberté de contrôle accrue avec une optimisation tenant compte de la fabrication. L'actionneur optimisé pour la topologie et la boîte à outils de fabrication qui l'accompagne peuvent être utilisés pour concevoir des actionneurs avec des capteurs et des éléments informatiques de base pour réaliser la vision à long terme des composites robotiques/autonomes multifonctionnels avec une intégration et une autonomie à grande échelle. Lorsque les scientifiques explorent davantage ces stratégies fondamentales, ils seront capables de former des actionneurs multifonctionnels avec une intervention humaine minimale.
© 2019 Réseau Science X