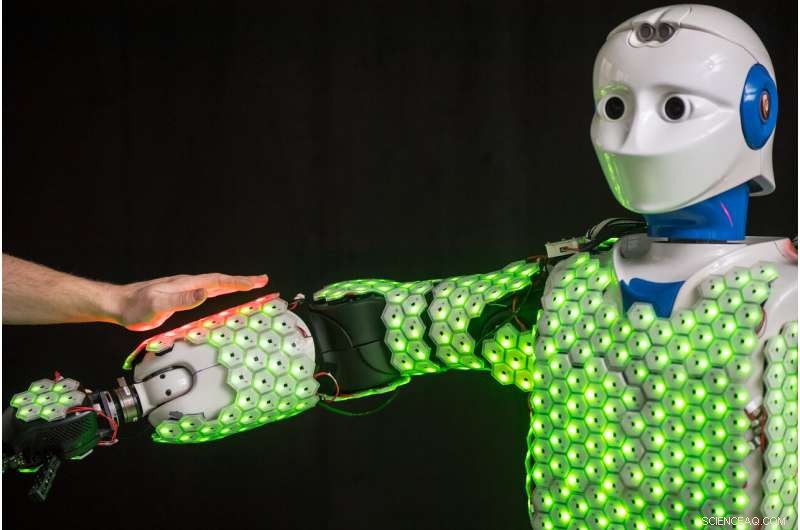
Chaque cellule de cette peau artificielle développée par des chercheurs de l'Université technique de Munich (TUM) est équipée d'un microprocesseur et de capteurs pour détecter les contacts, accélération, proximité et température. De nouveaux algorithmes de contrôle ont permis pour la première fois d'appliquer une peau artificielle à un robot à taille humaine. Crédit :Astrid Eckert/TUM
La peau synthétique sensible permet aux robots de sentir leur propre corps et leur environnement, une capacité cruciale s'ils doivent être en contact étroit avec les gens. Inspiré de la peau humaine, une équipe de l'Université technique de Munich (TUM) a développé un système combinant la peau artificielle avec des algorithmes de contrôle et l'a utilisé pour créer le premier robot humanoïde autonome avec une peau artificielle du corps entier.
La peau artificielle développée par le professeur Gordon Cheng et son équipe est constituée de cellules hexagonales de la taille d'une pièce de deux euros (c'est-à-dire d'environ un pouce de diamètre). Chacun est équipé d'un microprocesseur et de capteurs pour détecter les contacts, accélération, proximité et température. Une telle peau artificielle permet aux robots de percevoir leur environnement de manière beaucoup plus détaillée et avec plus de sensibilité. Cela les aide non seulement à se déplacer en toute sécurité. Cela les rend également plus sûrs lorsqu'ils opèrent à proximité de personnes et leur donne la possibilité d'anticiper et d'éviter activement les accidents.
Les cellules de la peau elles-mêmes ont été développées il y a environ 10 ans par Gordon Cheng, Professeur de systèmes cognitifs à la TUM. Mais cette invention n'a révélé tout son potentiel que lorsqu'elle a été intégrée dans un système sophistiqué tel que décrit dans le dernier numéro de la revue Actes de l'IEEE .
Plus de capacité de calcul grâce à une approche basée sur les événements
Le plus gros obstacle au développement d'une peau de robot a toujours été la capacité de calcul. La peau humaine compte environ 5 millions de récepteurs. Les efforts pour mettre en œuvre un traitement continu des données des capteurs dans la peau artificielle se heurtent rapidement à des limites. Les systèmes précédents étaient rapidement surchargés de données provenant de quelques centaines de capteurs seulement.
Pour surmonter ce problème, en utilisant une approche de neuro-ingénierie, Gordon Cheng et son équipe ne surveillent pas les cellules de la peau en continu, mais plutôt avec un système basé sur les événements. Cela réduit l'effort de traitement jusqu'à 90 pour cent. L'astuce :les cellules individuelles ne transmettent les informations de leurs capteurs que lorsque les valeurs sont modifiées. Ceci est similaire au fonctionnement du système nerveux humain. Par exemple, on sent un chapeau quand on le met pour la première fois, mais on s'habitue vite à la sensation. Il n'est pas nécessaire de remarquer à nouveau le chapeau jusqu'à ce que le vent le fasse tomber de notre tête. Cela permet à notre système nerveux de se concentrer sur de nouvelles impressions qui nécessitent une réponse physique.
Sécurité même en cas de contact corporel rapproché
Avec l'approche événementielle, Le professeur Cheng et son équipe ont maintenant réussi à appliquer une peau artificielle à un robot autonome à taille humaine ne dépendant d'aucun calcul externe. Le robot H-1 est équipé de 1260 cellules (avec plus de 13000 capteurs) sur le haut de son corps, les bras, jambes et même la plante de ses pieds. Cela lui donne une nouvelle "sensation corporelle". Par exemple, avec ses pieds sensibles, H-1 est capable de répondre aux surfaces de sol inégales et même de s'équilibrer sur une jambe.
Avec sa peau spéciale, le H-1 peut même faire un câlin à une personne en toute sécurité. C'est moins anodin qu'il n'y paraît :les robots peuvent exercer des forces qui blesseraient gravement un être humain. Lors d'un câlin, deux corps se touchent dans de nombreux endroits différents. Le robot doit utiliser ces informations complexes pour calculer les bons mouvements et exercer les bonnes pressions de contact. « Cela pourrait ne pas être aussi important dans les applications industrielles, mais dans des domaines tels que les soins infirmiers, les robots doivent être conçus pour un contact très étroit avec les personnes, " explique Gordon Cheng.
Crédit :Université technique de Munich
Polyvalent et robuste
Le système de peau de robot de Gordon Cheng est également très robuste et polyvalent. Parce que la peau est constituée de cellules, et pas un seul morceau de matériel, il reste fonctionnel même si certaines cellules cessent de fonctionner. "Notre système est conçu pour fonctionner sans problème et rapidement avec toutes sortes de robots, " dit Gordon Cheng. " Maintenant, nous travaillons à créer des cellules cutanées plus petites avec le potentiel d'être produites en plus grand nombre. "