Crédit :Université de Toronto
Des chercheurs en génie de l'Université de Toronto ont créé un robot miniature qui peut ramper avec un mouvement semblable à celui d'une chenille. La technologie sous-jacente pourrait un jour transformer les industries de l'aviation en appareils portables intelligents.
Le professeur Hani Naguib et son groupe sont spécialisés dans les matériaux intelligents. Un axe de leurs recherches porte sur les actionneurs électrothermiques (ETA), dispositifs faits de polymères spécialisés qui peuvent être programmés pour répondre physiquement aux changements électriques ou thermiques.
Par exemple, un ETA pourrait être programmé pour imiter les réflexes musculaires, se raidir quand il fait froid et se détendre quand il fait chaud.
Naguib et son équipe appliquent cette technologie au domaine de la robotique, créer des robots « doux » qui peuvent ramper et se courber. Ils pensent que ceux-ci pourraient un jour remplacer les robots volumineux et plaqués de métal que l'on trouve dans les industries manufacturières.
"À l'heure actuelle, les robots que vous trouverez dans l'industrie sont lourds, solide et en cage hors des travailleurs sur le sol de l'usine, car ils présentent des risques pour la sécurité, " explique Naguib.
« Mais l'industrie manufacturière se modernise pour répondre à la demande. De plus en plus, l'accent est mis sur l'intégration des interactions homme-robot, " ajoute-t-il. " Doux, les robots adaptables peuvent tirer parti de cette collaboration.
Bien que les matériaux réactifs soient étudiés depuis des décennies, l'équipe a découvert une nouvelle approche pour les programmer, ce qui a entraîné le mouvement de l'inchworm démontré dans un article récemment publié dans Rapports scientifiques .
"Les recherches existantes documentent la programmation des ETA à partir d'un état de repos plat. La forme-programmabilité d'une structure bidimensionnelle est limitée, donc la réponse est juste un mouvement de flexion, " explique le doctorant Yu-Chen (Gary) Sun, l'auteur principal du journal.
Par contre, Sun et ses co-auteurs ont créé un ETA avec un état de repos tridimensionnel.
Ils ont utilisé un induit thermique, méthode de relaxation et de durcissement du stress qui ouvre beaucoup plus de possibilités de forme et de mouvement.
« Ce qui est également nouveau, c'est la puissance requise pour induire le mouvement du ver à pouces. La nôtre est plus efficace que tout ce qui a existé dans la littérature de recherche jusqu'à présent, " dit Soleil.
Naguib dit que ces robots souples programmables à changement de forme ne révolutionneront pas seulement les industries manufacturières :ils pourraient être utiles dans des domaines tels que la sécurité, aviation, chirurgie et électronique portable.
"Dans les situations où les humains pourraient être en danger - une fuite de gaz ou un incendie - nous pourrions équiper un robot rampant d'un capteur pour mesurer l'environnement nocif, " explique Naguib. " Dans l'aéronautique, nous pourrions voir des matériaux intelligents être la clé des avions de nouvelle génération avec des ailes qui se transforment. »
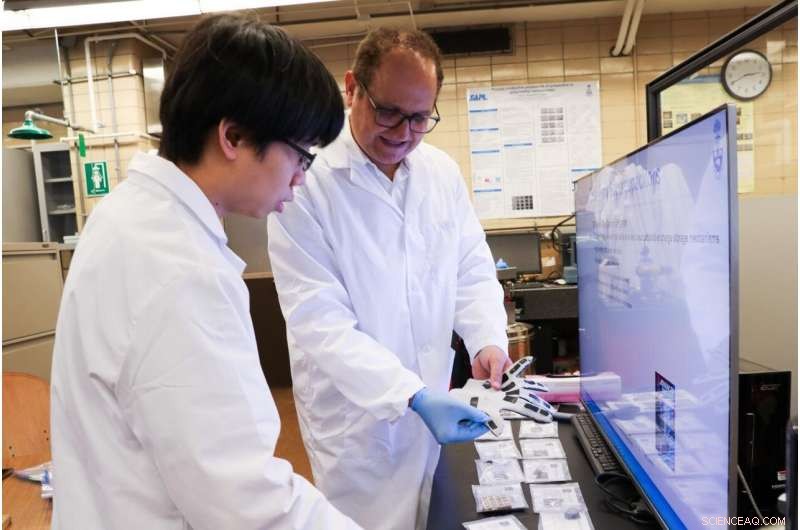
Le doctorant Yu-Chen (Gary) Sun et le professeur Hani Naguib conçoivent des robots souples et des dispositifs portables avec des matériaux intelligents qui répondent physiquement aux changements électrothermiques de l'environnement. Crédit :Liz Do
Bien qu'il souligne qu'il faudra un certain temps avant que le monde ne voit des avions à ailes morphées, l'impact le plus immédiat sera vu dans la technologie portable.
"Nous travaillons pour appliquer ce matériau aux vêtements. Ces vêtements se compriment ou se relâchent en fonction de la température corporelle, qui pourrait être thérapeutique pour les athlètes, " dit Naguib. L'équipe étudie également si les vêtements intelligents pourraient être bénéfiques pour les lésions de la moelle épinière.
Au cours de l'année suivante, L'équipe de Naguib se concentre sur l'accélération du mouvement d'exploration réactif, et en regardant d'autres configurations.
"Dans ce cas, nous l'avons entraîné à se déplacer comme un ver, " dit-il. " Mais notre approche innovante signifie que nous pourrions entraîner des robots à imiter de nombreux mouvements, comme les ailes d'un papillon. "