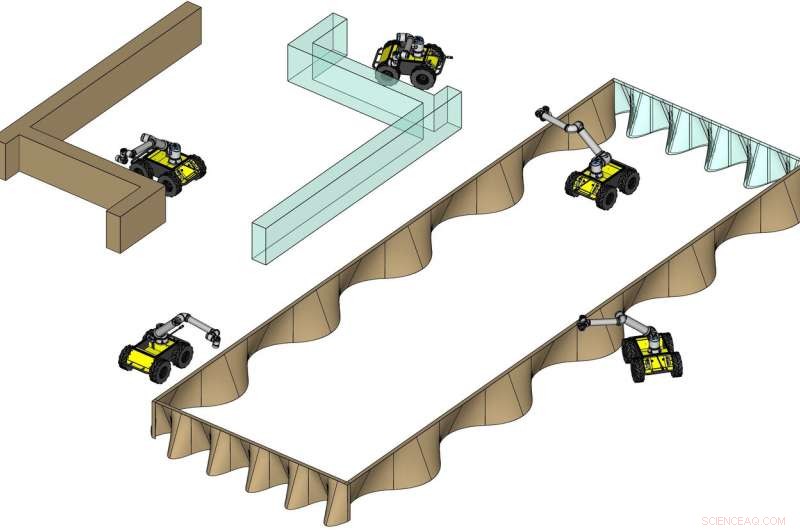
Une équipe de robotique multidisciplinaire composée de professeurs de la NYU Tandon School of Engineering conçoit des systèmes de contrôle pour les imprimantes 3D sur des bras robotiques au sommet de mobiles, plates-formes itinérantes. Fonctionnant en équipe -- un concept appelé fabrication additive collective (FAO) -- ces imprimantes, avec l'apprentissage automatique et d'autres capacités d'intelligence artificielle (IA), pourrait réparer les structures civiques; travailler dans les profondeurs océaniques et les zones sinistrées; ou même partir dans l'espace pour travailler sur la Lune, Mars, et au-delà. Crédit :NYU Tandon
L'impression 3D commerciale - ou fabrication additive (AM) - est une industrie en plein essor. Mais si les imprimantes étaient libérées de la configuration typique impliquant une boîte immobile et un portique, et libre de travailler en itinérance, équipes collaboratives, l'activité AM pourrait être beaucoup plus importante avec beaucoup plus d'applications, y compris en tant que maçons robotiques sur les chantiers de construction et en réparant les infrastructures civiles urbaines et rurales en ruine.
Une équipe de robotique multidisciplinaire à la NYU Tandon School of Engineering, hébergé par le Center for Urban Science and Progress (CUSP) de NYU et soutenu par une subvention de 1,2 million de dollars de la National Science Foundation (NSF), travaille à faire du concept une réalité en concevant des systèmes autonomes pour imprimantes 3D sur bras robotiques attachés au mobile, plates-formes itinérantes. Fonctionnant en équipe - un concept appelé fabrication additive collective (FAO) - ces imprimeurs, avec l'apprentissage automatique et d'autres capacités d'intelligence artificielle (IA), pourrait réparer des ponts, tunnels et autres structures civiques; travailler dans les profondeurs océaniques et les zones sinistrées; ou même partir dans l'espace pour travailler sur la Lune, Mars, et au-delà.
Les chercheurs, Chen Feng, Maurizio Porfiri, Ludovic Righetti, et Weihua Jin, professeurs des départements de génie civil et urbain, Génie mécanique et aérospatial, et Génie électrique et informatique, se concentrera sur trois domaines essentiels à la viabilité des équipes FAO d'impression 3D :l'autonomie, contrôler, systèmes temps réel et réseau :
Feng a expliqué que l'objectif est la précision, Efficacité, et l'adaptabilité à l'environnement et aux conditions en temps réel, plutôt comme une application de navigation redirige un véhicule qui, selon elle, a dévié d'un parcours cartographié. Contrairement au service de navigation GPS typique, cependant, les réglages doivent être ultra-rapides et précis à quelques millimètres, pas quelques dizaines de mètres. Il a ajouté que la combinaison unique d'expertise de l'équipe en robotique, intelligence artificielle, théorie du contrôle, et les systèmes dynamiques rendent les défis surmontables.
Feng se concentrera sur la planification et la localisation, relever des défis tels que comment permettre au robot d'identifier quand et quand il n'a pas besoin d'un degré élevé de précision pour se localiser.
« Le robot doit pouvoir se déplacer rapidement vers la zone d'impression, observer les conditions réelles, telles qu'un terrain accidenté, puisque le monde réel n'est pas planaire, alors faites des compensations immédiatement, " a-t-il dit. " Et même si nous voulons avoir un degré de précision plus élevé dans la zone de structure, plus vous vous éloignez de la structure, moins vous en avez besoin, " at-il expliqué. " Cela impliquera un nouveau type de localisation proactive. "
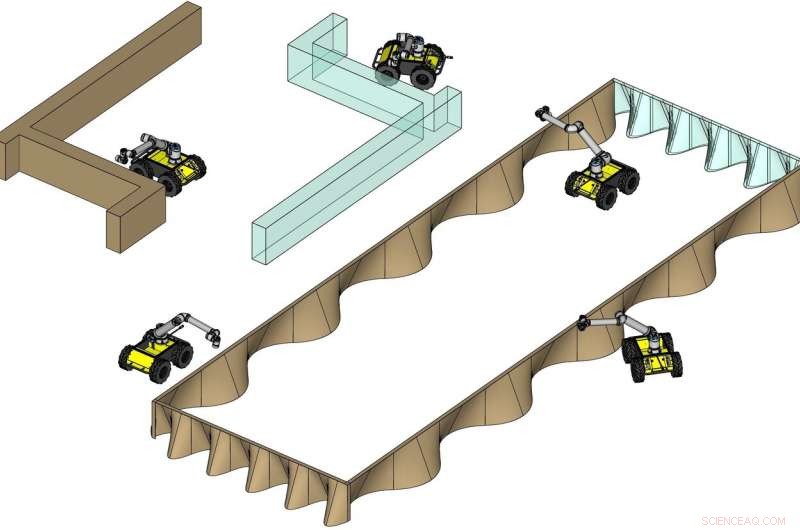
professeurs de NYU Tandon Chen Feng, Ludovic Righetti et Maurizio Porfiri conçoivent des systèmes de fabrication additive collective, dans lequel des équipes de robots mobiles d'impression 3D travaillent ensemble pour réparer ou construire des structures, ou même travailler sur la lune ou sur Mars. Crédit :NYU Tandon
Righetti travaillera sur des algorithmes de contrôle optimal en temps réel de chaque imprimante mobile, pour permettre au robot de s'adapter rapidement à l'environnement.
"Chaque robot doit observer ce qui est imprimé, l'associer de manière autonome à la conception du projet, et reconnaître instantanément si la structure imprimée s'en écarte, et de combien, et pendant tout ce temps décider quelles sont les prochaines meilleures actions pour assurer une impression correcte de la structure, " il a dit.
Porfiri développera un cadre mathématique pour permettre aux robots de coordonner de manière autonome leurs actions respectives dans l'environnement physique en évolution, permettant à plusieurs imprimantes mobiles de créer simultanément une structure avec une plus grande efficacité. Cette capacité serait particulièrement importante dans des endroits comme Mars où il n'y a pas de serveur distant suffisamment proche pour contrôler les efforts coordonnés des robots sans décalage.
« Différent des drones volant en formation ou des voitures autonomes se tenant à distance les uns des autres, nos imprimantes mobiles laissent une empreinte unique dans l'environnement physique :l'objet imprimé. Mon travail tirera parti de cette même empreinte pour établir des algorithmes efficaces pour la coordination et l'impression collective."
Jin aidera l'équipe à développer de nouveaux matériaux composites adaptés à l'impression mobile 3D du béton. L'équipe prévoit de démontrer l'efficacité des algorithmes en imprimant en 3D dans le monde réel ces nouveaux bétons à l'aide d'imprimantes mobiles qu'ils construiront à NYU Tandon.
« Pour libérer tout le potentiel de la fabrication additive collective, plusieurs frontières scientifiques doivent être repoussées, assurer un déploiement optimal de plusieurs robots mobiles qui impriment de grandes structures selon une conception, conception virtuelle, " dit Feng.
Le projet comprend un atelier industriel sur la FAO, une exposition publique en plein air, kit pédagogique abordable/ouvert sur CAM, Concours CAM à l'échelle de bureau K-12, des activités entrepreneuriales et un effort de diversité pour les étudiants de tous horizons.