Crédit :Soter et al.
Des chercheurs du Bristol Robotics Laboratory et de l'Université de Bristol ont récemment mis au point un nouveau capteur robotique souple semblable à la peau, basé sur la transmission fluidique. Ce capteur, présenté à la deuxième conférence internationale de l'IEEE sur la robotique douce (RoboSoft), pourrait avoir des applications intéressantes dans une variété de domaines, allant de la robotique à la réalité virtuelle (VR).
« Intégrer des capteurs dans des mains robotiques est une tâche difficile car souvent, nous devons compresser de nombreux composants dans un espace limité, " Gabor Soter, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Notre idée était de transmettre les signaux sensoriels à d'autres parties du corps, où il y a plus d'espace pour le matériel de détection et de traitement."
Flux de peau, le capteur développé par Soter et ses collègues, s'inspire en partie des mécanismes biologiques observés chez les araignées. Les araignées sont capables de transmettre la pression hydraulique à différentes parties de leur corps à des fins d'actionnement. En d'autres termes, ils peuvent générer une pression à l'intérieur de leur corps et transmettre cette énergie à leurs jambes afin de les déplacer.
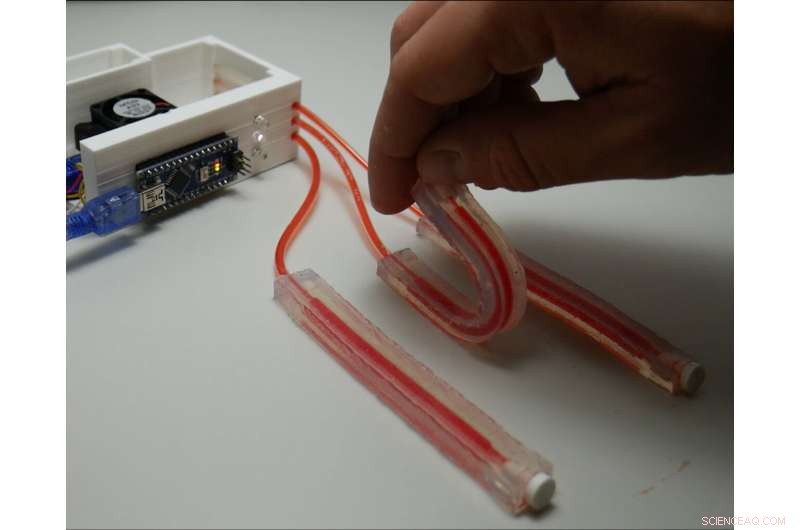
Les chercheurs ont tenté de reproduire ce mécanisme en combinant des chambres en silicone souple remplies de liquide avec des capteurs optiques qui mesurent la pression, flexion et vibrations. Skinflow a trois composants clés :une peau douce remplie de liquide coloré, un écran et une caméra. Lorsqu'il est stimulé mécaniquement, le volume de ses chambres en silicone change, et ce changement est transmis sur son afficheur via un incompressible, liquide coloré.
"En raison de l'interaction avec la peau, le volume des chambres de Skinflow change et cela déplace le liquide coloré, " explique Soter. " Le déplacement du liquide est mesuré par une caméra et nous utilisons des algorithmes de traitement d'images pour quantifier ce changement. Par ici, nous pouvons recalculer l'emplacement et l'intensité de l'interaction de l'utilisateur avec la peau du robot."
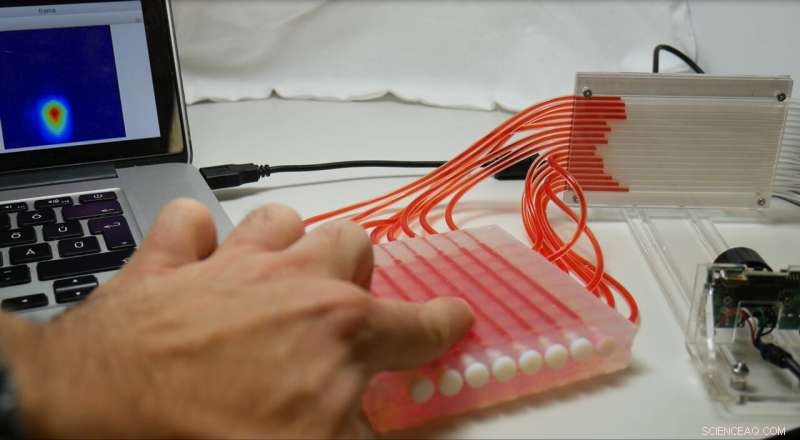
Le pavé tactile développé avec Skinflow. Crédit :Soter et al.
Les capteurs Skinflow sont remarquablement bon marché, évolutif et sûr à utiliser dans les environnements humains. Dans leur étude, les chercheurs ont présenté trois implémentations possibles pour leur capteur. D'abord, ils l'ont utilisé pour créer une matrice de boutons programmables avec quatre boutons sensibles à la pression.
Ils l'ont également utilisé pour créer un pavé tactile souple en 3D composé de deux couches de capteurs orientées à 90 degrés l'une par rapport à l'autre, qui ont tous deux huit macrocanaux remplis de liquide coloré. Dans cette implémentation, Skinflow a été utilisé pour mesurer la position et l'intensité du toucher d'un utilisateur.
Finalement, les chercheurs ont intégré le capteur à une caméra de vision intelligente et à un microcontrôleur. Ils ont ensuite connecté trois capteurs de courbure souple à l'unité de traitement d'un appareil et les ont utilisés pour contrôler la luminosité de trois lumières LED en temps réel en les pliant.
« Skinflow pourrait avoir de nombreuses applications dont la réalité virtuelle, robotique, soins de santé, maisons intelligentes, technologie portable et télé-manipulation, " a déclaré Soter. " C'est également une technologie très prometteuse pour les applications où les composants électroniques standard ne peuvent pas être utilisés en raison d'interférences électromagnétiques, par exemple dans les scanners d'imagerie par résonance magnétique (IRM), ou radioactivité, par exemple dans les centrales nucléaires."
À l'avenir, le capteur développé par Soter et ses collègues pourrait aider au développement d'une vaste gamme de technologies innovantes et intelligentes. Les chercheurs expérimentent actuellement Skinflow et l'utilisent pour développer de nouveaux dispositifs portables et d'interaction humaine.
© 2019 Réseau Science X