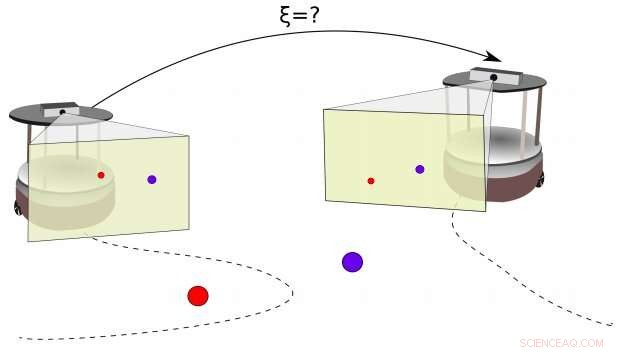
Une représentation du problème abordé dans l'étude récente. Deux robots observent une paire de points 3D. Les chercheurs proposent un pipeline pour estimer simultanément la profondeur 3D des deux points 3D et obtenir simultanément leur pose relative. Crédit :Rodrigues et al.
Des chercheurs de l'Université de Porto au Portugal et de l'Institut royal de technologie KTH en Suède ont récemment développé un cadre permettant d'estimer la profondeur et la pose relative de deux robots au sol qui collaborent sur une tâche donnée. leur cadre, décrit dans un article prépublié sur arXiv, pourrait aider à améliorer les performances de plusieurs robots dans des tâches impliquant l'exploration, manipulation, couverture, échantillonnage et patrouille, ainsi que dans les missions de recherche et de sauvetage.
Dans les années récentes, les chercheurs ont mené un nombre croissant d'études visant à développer des solutions pour coordonner efficacement plusieurs robots au sein d'une architecture décentralisée. Pour aborder efficacement une tâche donnée en groupe, les robots individuels au sein d'un essaim ou d'une formation devraient être au moins en partie conscients de la pose d'autres agents dans leur environnement.
Ces données liées à la pose, connu sous le nom d'information de pose relative, permet à un agent d'optimiser la fonction d'un objectif donné, replanifier ses trajectoires et éviter les collisions avec d'autres robots. Dans certains contextes du monde réel, cependant, il peut être difficile pour les agents d'obtenir des estimations de pose relatives précises. Par exemple, lors de missions extrêmes dans des zones reculées ou isolées, les robots peuvent rencontrer des problèmes avec les canaux de communication et avec les systèmes de positionnement ou de capture de mouvement de haute précision.
Avec ça en tête, L'équipe de chercheurs de l'Université de Porto et de KTH a entrepris de développer un cadre qui pourrait améliorer l'estimation de la profondeur en 3D et l'estimation de la pose relative des robots au sol qui travaillent ensemble vers un objectif commun. Ils se sont spécifiquement concentrés sur un scénario impliquant deux véhicules terrestres autonomes naviguant dans un environnement inconnu, tous deux équipés de caméras perspective.
Pipeline du cadre proposé par les chercheurs. Crédit :Rodrigues et al.
"Le problème d'estimation de profondeur vise à récupérer les informations 3-D de l'environnement, " expliquent les chercheurs dans leur article. " Le problème de localisation relative consiste à estimer la pose relative entre deux robots, en détectant la pose de l'autre ou en partageant des informations sur l'environnement perçu."
La plupart des solutions existantes pour l'estimation de la profondeur et la localisation relative dans les robots fonctionnent en analysant un ensemble de données déconnecté, sans tenir compte de l'ordre chronologique des événements. L'approche proposée par les chercheurs, d'autre part, considère les informations recueillies par les deux robots individuellement via leurs caméras, puis les combine pour calculer la pose relative entre eux. Les informations d'estimation de profondeur recueillies par les deux agents et les commandes d'entrée sont transmises à un filtre de Kalman étendu (EKF), qui est conçu pour traiter ces données et estimer la pose relative entre les robots.
« Alors que les solutions précédentes pour ce problème considèrent un ensemble de deux images ou plus de l'environnement ou utilisent une configuration de flotte spéciale (par exemple, les robots sont dans le champ de vision des autres ou ont la capacité de détecter les informations de relèvement les uns sur les autres. postes), nous proposons un cadre qui partage un ensemble d'observations communes de l'environnement dans le cadre local respectif de chaque robot (des caractéristiques ponctuelles 3D sont utilisées), " écrivent les chercheurs.
Les chercheurs ont évalué leur cadre dans une série de scénarios simulés, en utilisant deux robots terrestres appelés TurtleBots. Leurs résultats suggèrent que leur approche permet en fait une estimation de profondeur efficace et une localisation relative pour deux robots collaborant sur une tâche. Dans leurs futurs travaux, les chercheurs envisagent également d'envisager le contrôle actif de deux robots dans le même scénario exploré dans leur récente étude, ainsi que d'autres aspects relatifs à leur coordination.
© 2019 Réseau Science X