L'appareil SensFoot. Crédit :Moschetti et al
Chercheurs de l'Institut de BioRobotique de la Scuola Superiore Sant"Anna, Co-Robotics srl et Sheffield Hallam University ont récemment proposé une nouvelle approche pour améliorer les interactions entre les humains et les robots lorsqu'ils marchent ensemble. Leur papier, publié dans le MDPI Robotique journal, propose l'utilisation de capteurs portables comme moyen d'améliorer la collaboration entre un humain et un robot qui se déplacent dans un environnement partagé.
Les progrès technologiques récents ont permis l'utilisation de robots comme assistants dans un large éventail de situations de la vie quotidienne. Pour bien fonctionner dans la plupart de ces paramètres, cependant, les robots devraient pouvoir interagir avec les utilisateurs humains de manière transparente et efficace. Les chercheurs ont donc développé des approches et des techniques pour améliorer la capacité des robots à comprendre les signaux sociaux et à réagir en conséquence.
Dans leur étude, l'équipe s'est particulièrement concentrée sur des tâches impliquant des humains et des robots marchant ensemble ou effectuant une tâche impliquant de se tenir debout et de se déplacer dans un environnement partagé. Leur objectif était de développer une approche qui permet à l'homme de se déplacer naturellement dans un espace donné avec un robot, sans avoir besoin de liens physiques entre les deux.
"Cet article propose l'utilisation d'unités de mesure inertielles (IMU) portables pour améliorer l'interaction entre l'homme et le robot tout en marchant ensemble sans liens physiques et sans restriction sur la position relative entre l'homme et le robot, ", écrivent les chercheurs dans leur article.
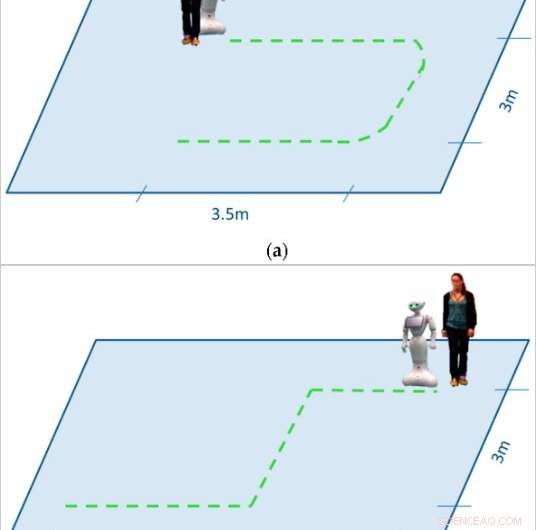
Schéma de la tâche suivante (a) et de la tâche de suivi (b). Crédit :Moschetti et al.
L'approche proposée par les chercheurs implique l'utilisation de capteurs IMU, qui sont des appareils électroniques qui mesurent et rapportent l'orientation, vitesse et autres données relatives aux mouvements, utilisant généralement des accéléromètres, gyroscopes et/ou magnétomètres. Ces capteurs sont portés par les humains (par exemple sur leurs chaussures) sans les gêner, leur permettant ainsi de se déplacer librement dans leur espace environnant.
Les IMU collectent des informations en temps réel sur les mouvements de l'utilisateur humain et les paramètres liés à la marche (par exemple, la vitesse de marche, longueur de foulée, angle d'orientation, etc.). Ensuite, ces données sont traitées et utilisées pour façonner le mouvement du robot, créant finalement une interaction plus naturelle entre les deux agents.
Les chercheurs ont construit un prototype de système IMU appelé SensFoot et évalué sa précision et son efficacité dans une série d'expériences impliquant des humains et des robots interagissant les uns avec les autres. Ils ont recruté 19 participants humains et leur ont demandé d'effectuer deux tâches différentes, qu'ils appellent une « tâche suivante » et une tâche « Suivez-moi ».
D'abord, ils ont vérifié la précision de leur système en comparant les informations de marche calculées par un système de vision de référence avec celles dérivées des données collectées par les IMU. Ensuite, ils ont testé les capteurs dans un véritable scénario d'interaction homme-robot.
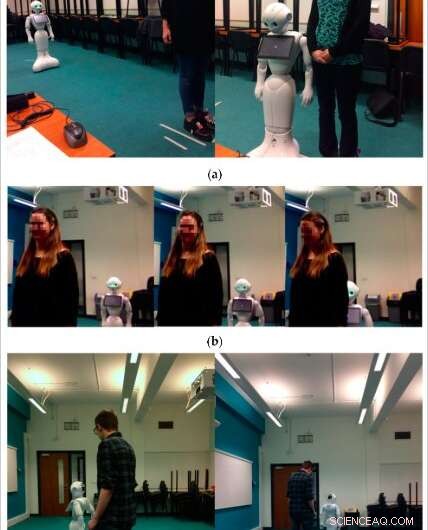
Exemple de tests avec les utilisateurs (a) et séquences de la tâche suivante (b) et de la tâche de suivi (c). Crédit :Moschetti et al.
"Nous avons expérimenté avec 19 participants humains dans deux tâches différentes, fournir des évaluations en temps réel des paramètres de marche d'un robot mobile se déplaçant avec un humain, et étudié la faisabilité et l'utilisabilité perçue par les participants, " les chercheurs ont écrit. " Les résultats montrent la faisabilité du système, qui a obtenu des retours positifs des utilisateurs, donner des informations précieuses pour le développement d'un système d'interaction naturel, où le robot perçoit les mouvements humains au moyen de capteurs portables."
Les évaluations réalisées par les chercheurs ont donné des résultats très prometteurs, suggérant que l'utilisation d'IMU pourrait améliorer considérablement les interactions entre les humains et les robots qui se déplacent dans un espace partagé. De plus, les commentaires recueillis auprès des participants qui ont testé les capteurs étaient extrêmement positifs. À l'avenir, l'approche proposée par les chercheurs pourrait ouvrir la voie à des solutions de robotique d'assistance plus adaptatives et efficaces qui impliquent l'intégration d'IMU ou d'autres capteurs avec des algorithmes d'apprentissage automatique.
"Les travaux futurs concernent la possibilité d'améliorer la perception du système de l'utilisateur à pied, améliorer la précision des paramètres extraits, et l'adaptabilité du robot, surmonter les limitations actuelles en matière de contrôle et d'intégration, " ont écrit les chercheurs.
© 2019 Réseau Science X