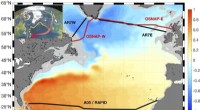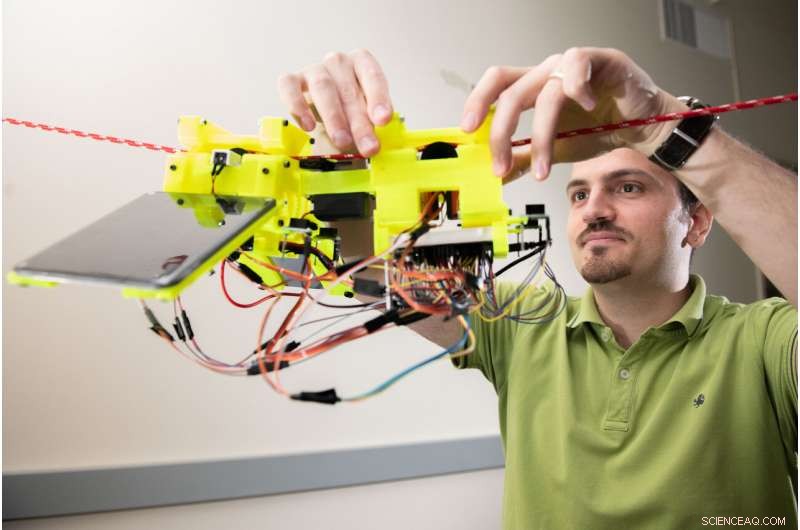
L'assistant de recherche diplômé Gennaro Notomista montre les composants de SlothBot sur un câble dans un laboratoire de Georgia Tech. Le robot est conçu pour être lent et économe en énergie pour des applications telles que la surveillance environnementale. Crédit :Allison Carter, Géorgie Tech
Pour la surveillance environnementale, agriculture de précision, maintenance des infrastructures et de certaines applications de sécurité, lent et économe en énergie peut être meilleur que rapide et nécessite toujours une recharge. C'est là qu'intervient "SlothBot".
Alimenté par une paire de panneaux photovoltaïques et conçu pour s'attarder dans la canopée de la forêt en continu pendant des mois, SlothBot ne se déplace que lorsqu'il doit mesurer des changements environnementaux, tels que des facteurs météorologiques et chimiques dans l'environnement, qui ne peuvent être observés qu'avec une présence à long terme. Le robot hyper-efficace preuve de concept, décrit le 21 mai lors de la Conférence internationale sur la robotique et l'automatisation (ICRA) à Montréal, pourrait bientôt traîner parmi les câbles de la cime des arbres dans le jardin botanique d'Atlanta.
« En robotique, il semble que nous cherchons toujours à aller plus vite, des robots plus agiles et plus extrêmes, " dit Magnus Egerstedt, Steve W. Chaddick School Chair de l'École de génie électrique et informatique du Georgia Institute of Technology et chercheur principal de Slothbot. « Mais il existe de nombreuses applications pour lesquelles il n'est pas nécessaire d'être rapide. Vous devez simplement être présent de manière persistante sur de longues périodes, observer ce qui se passe."
Sur la base de ce qu'Egerstedt a appelé la "théorie de la lenteur, " L'assistant de recherche diplômé Gennaro Notomista a conçu SlothBot avec son collègue, Youssef Emam, en utilisant des pièces imprimées en 3D pour les mécanismes d'engrenage et de commutation de fil nécessaires pour ramper à travers un réseau de fils dans les arbres. Le plus grand défi pour un robot rampant est de passer d'un câble à un autre sans tomber, dit Notomista.
« Le défi consiste à s'accrocher en douceur à un fil tout en en attrapant un autre, " a-t-il dit. " C'est une manœuvre délicate et vous devez la faire correctement pour assurer une transition à toute épreuve. S'assurer que les commutateurs fonctionnent bien sur de longues périodes est vraiment le plus grand défi. »
Mécaniquement, SlothBot se compose de deux corps reliés par une charnière actionnée. Chaque carrosserie abrite un moteur d'entraînement relié à une jante sur laquelle est monté un pneumatique. L'utilisation des roues pour la locomotion est simple, économe en énergie et plus sûr que les autres types de locomotion filaire, disent les chercheurs.
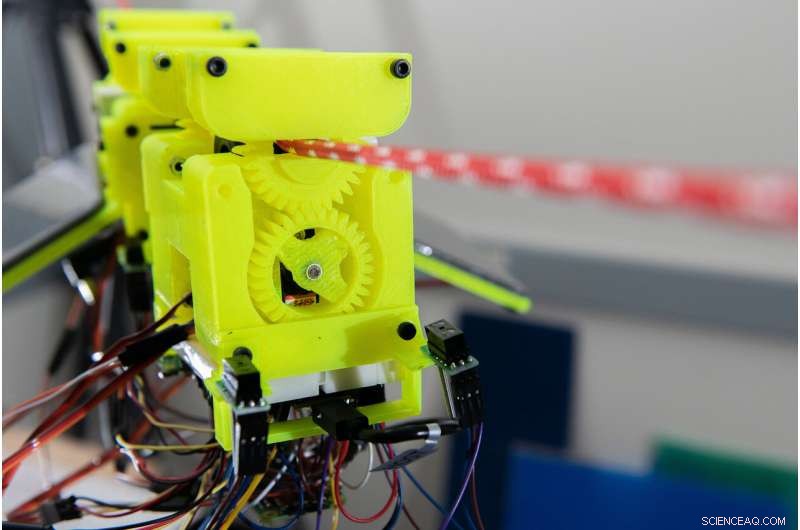
L'image montre les composants du SlothBot, qui est alimenté par deux panneaux photovoltaïques. Des engrenages et des commutateurs imprimés en 3D aident le robot à passer d'un câble à un autre. Crédit :Allison Carter, Géorgie Tech
SlothBot a jusqu'à présent exploité un réseau de câbles sur le campus de Georgia Tech. Prochain, une nouvelle coque imprimée en 3D, qui fait ressembler le robot à un paresseux, protégera les moteurs, engrenages, actionneurs, appareils photo, ordinateur et autres composants de la pluie et du vent. Cela préparera le terrain pour des études à plus long terme sur la canopée du jardin botanique d'Atlanta, où Egerstedt espère que les visiteurs verront un SlothBot surveiller les conditions dès cet automne.
Le nom SlothBot n'est pas une coïncidence. Les paresseux réels sont de petits mammifères qui vivent dans les canopées de la jungle d'Amérique du Sud et d'Amérique centrale. Gagner leur vie en mangeant des feuilles d'arbres, les animaux peuvent survivre avec l'équivalent calorique quotidien d'une petite pomme de terre. Avec leur métabolisme lent, les paresseux se reposent autant 22 heures par jour et descendent rarement des arbres où ils peuvent passer toute leur vie.
"La vie d'un paresseux est assez lente et il n'y a pas beaucoup d'excitation au quotidien, " a déclaré Jonathan Pauli, professeur agrégé au Département d'écologie forestière et faunique de l'Université du Wisconsin-Madison, qui a consulté l'équipe de Georgia Tech sur le projet. "Ce qui est bien avec une histoire de vie très lente, c'est que vous n'avez pas vraiment besoin de beaucoup d'apport d'énergie. Vous pouvez avoir une longue durée et une persistance dans une zone limitée avec très peu d'apports d'énergie sur une longue période de temps."
C'est exactement ce que les chercheurs attendent de SlothBot, dont le développement a été financé par l'Office of Naval Research des États-Unis.
"Il y a beaucoup de choses que nous ne savons pas sur ce qui se passe réellement sous les zones couvertes d'arbres denses, " a déclaré Egerstedt. " La plupart du temps, SlothBot va simplement traîner là-bas, et de temps en temps, il se déplacera dans un endroit ensoleillé pour recharger la batterie."
Les chercheurs espèrent également tester SlothBot dans une plantation de cacao au Costa Rica qui abrite déjà de vrais paresseux. "Les câbles utilisés pour déplacer le cacao sont devenus une autoroute paresseuse parce que les animaux les trouvent utiles pour se déplacer, " dit Egerstedt. " Si tout va bien, nous déploierons des SlothBots le long des câbles pour surveiller les paresseux."

Jonathan Pauli regarde un paresseux à deux doigts descendre un câble dans une plantation de cacao du nord-est du Costa Rica. Pauli collabore avec M. Zachariah Peery pour étudier les paresseux arboricoles sur le terrain depuis une décennie. Crédit :M. Zachariah Peery
Egerstedt est connu pour ses algorithmes qui pilotent des essaims de petits robots à roues ou volants. Mais lors d'une visite au Costa Rica, il s'est intéressé aux paresseux et a commencé à développer ce qu'il appelle "une théorie de la lenteur" avec le professeur Ron Arkin à la Georgia Tech's School of Interactive Computing. La théorie tire parti des avantages de l'efficacité énergétique.
« Si vous faites des choses comme la surveillance environnementale, vous voulez être dans la forêt pendant des mois, " a déclaré Egerstedt. " Cela change la façon dont vous envisagez les systèmes de contrôle à un niveau élevé. "
Les robots volants sont déjà utilisés pour la surveillance environnementale, mais leurs besoins énergétiques élevés signifient qu'ils ne peuvent pas s'attarder longtemps. Les robots à roues peuvent se débrouiller avec moins d'énergie, mais ils peuvent rester coincés dans la boue ou être gênés par les racines des arbres, et ne peut pas obtenir une vue d'ensemble depuis le sol.
"Ce qui coûte plus cher en énergie qu'autre chose, c'est le mouvement, " a déclaré Egerstedt. " Déménager coûte beaucoup plus cher que de sentir ou de penser. Pour les robots environnementaux, vous ne devez vous déplacer que lorsque vous le devez absolument. Nous devions réfléchir à ce que cela donnerait."
Pour Pauli, qui étudie une variété d'animaux sauvages, travailler avec Egerstedt pour aider SlothBot à prendre vie a été gratifiant.
"C'est formidable de voir un robot inspiré de la biologie des paresseux, " a-t-il déclaré. " Cela a été amusant de partager comment les paresseux et d'autres organismes qui vivent dans ces écosystèmes pendant de longues périodes vivent leur vie. Il sera intéressant de voir des robots refléter ce que nous voyons dans les communautés écologiques naturelles."