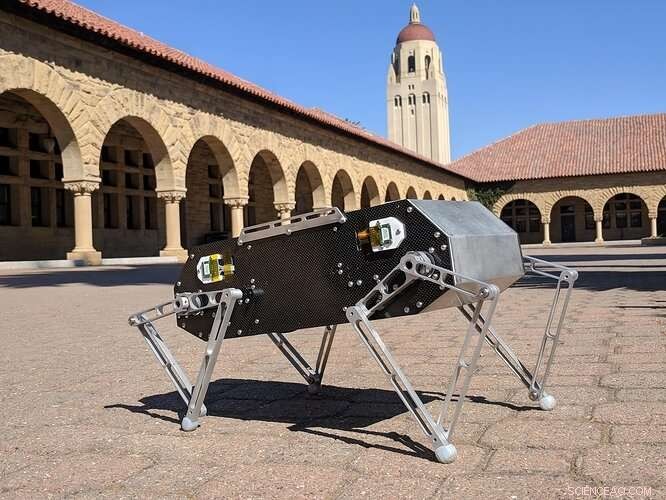
Stanford Doggo Project :un robot quadrupède alimenté par ODrive
Mettre leur propre touche sur des robots qui se promènent dans des paysages compliqués, l'équipe de mobilité extrême du club de robotique étudiant de Stanford a développé un robot à quatre pattes qui est non seulement capable d'effectuer des figures acrobatiques et de traverser des terrains difficiles, mais qui est également conçu dans un souci de reproductibilité. Quiconque veut sa propre version du robot, surnommé Stanford Doggo, peut consulter des plans complets, code et une liste de fournitures que les étudiants ont mis gratuitement à disposition en ligne.
"Nous avions vu ces autres robots quadrupèdes utilisés dans la recherche, mais ce n'était pas quelque chose que vous pouviez apporter dans votre propre laboratoire et utiliser pour vos propres projets, " dit Nathan Kau, '20, une majeure en génie mécanique et responsable de la mobilité extrême. "Nous voulions que Stanford Doggo soit ce robot open source que vous pourriez construire vous-même avec un budget relativement petit."
Alors que d'autres robots similaires peuvent coûter des dizaines ou des centaines de milliers de dollars et nécessitent des pièces personnalisées, les étudiants d'Extreme Mobility estiment le coût de Stanford Doggo à moins de 3$, 000, y compris les frais de fabrication et d'expédition, et presque tous les composants peuvent être achetés tels quels en ligne. Ils espèrent que l'accessibilité de ces ressources inspire une communauté de fabricants et de chercheurs de Stanford Doggo qui développent des retombées innovantes et significatives à partir de leur travail.
Déjà Stanford Doggo peut marcher, trot, Danse, sauter, sauter et effectuer le backflip occasionnel. Les étudiants travaillent sur une version plus grande de leur création, qui fait actuellement à peu près la taille d'un beagle, mais prendront une courte pause pour présenter Stanford Doggo à la Conférence internationale sur la robotique et l'automatisation le 21 mai à Montréal, Canada.
Un saut, un saut et un backflip
Afin de rendre Stanford Doggo reproductible, les étudiants l'ont construit à partir de zéro. Cela signifiait passer beaucoup de temps à rechercher des fournitures facilement accessibles et à tester chaque pièce au fur et à mesure de sa fabrication, sans s'appuyer sur des simulations.
"Cela fait environ deux ans que nous avons eu l'idée de faire un quadrupède. Nous avons certainement fait plusieurs prototypes avant de commencer à travailler sur cette itération du chien, " dit Nathalie Ferrante, '19, un étudiant coterminal en génie mécanique et membre de l'équipe de mobilité extrême. "C'était très excitant la première fois que nous l'avons fait marcher."
Certes, les premiers pas de Stanford Doggo étaient des petits, mais maintenant le robot peut maintenir une démarche cohérente et la trajectoire souhaitée, même s'il rencontre des terrains différents. Il le fait à l'aide de moteurs qui détectent les forces externes sur le robot et déterminent la force et le couple que chaque jambe doit appliquer en réponse. Ces moteurs recalculent à 8, 000 fois par seconde et sont essentiels à la danse signature du robot :un boogie rebondissant qui cache le fait qu'il n'a pas de ressorts. Au lieu, les moteurs agissent comme un système de ressorts virtuels, faire rebondir le robot en douceur mais avec gaieté chaque fois qu'il sent qu'il n'est pas en position.
Parmi les compétences et astuces que l'équipe a ajoutées au répertoire du robot, les étudiants ont été exceptionnellement surpris par ses prouesses de saut. Exécuter Stanford Doggo à l'épreuve un (très) tôt le matin dans le laboratoire, l'équipe s'est rendu compte qu'il s'élevait sans effort à 2 pieds dans les airs. En repoussant les limites du logiciel du robot, Stanford Doggo a pu sauter 3, puis 3½ pieds du sol.
"C'est à ce moment-là que nous avons réalisé que le robot était, à certains égards, plus performants que les autres robots quadrupèdes utilisés dans la recherche, même si c'était vraiment pas cher, " se souvient Kau.
Depuis, les étudiants ont appris à Stanford Doggo à faire un backflip, mais toujours sur le rembourrage pour permettre une expérimentation rapide d'essais et d'erreurs.
Que fera ensuite Stanford Doggo ?
Si ces étudiants ont ce qu'ils veulent, l'avenir de Stanford Doggo entre les mains des masses.
"Nous espérons fournir un système de base que n'importe qui pourrait construire, " a déclaré Patrick Slade, étudiant diplômé en aéronautique et astronautique et mentor pour Extreme Mobility. "Dire, par exemple, vous vouliez travailler dans le domaine de la recherche et du sauvetage ; vous pourriez l'équiper de capteurs et écrire du code sur le nôtre qui lui permettrait de grimper sur des tas de roches ou de creuser dans des grottes. Ou peut-être qu'il s'agit de ramasser des trucs avec un bras ou de porter un colis."
Cela ne veut pas dire qu'ils ne poursuivent pas leur propre travail. Extreme Mobility collabore avec le Robotic Exploration Lab de Zachary Manchester, professeur assistant d'aéronautique et d'astronautique, pour tester de nouveaux systèmes de contrôle sur un deuxième Stanford Doggo. L'équipe a également terminé la construction d'un robot deux fois plus grand que Stanford Doggo qui peut transporter environ 6 kilogrammes d'équipement. Son nom est Stanford Woofer.