Les chercheurs de l'Université Purdue construisent des colibris robotiques qui apprennent à partir de simulations informatiques comment voler comme un vrai colibri. Le robot est enfermé dans une coque décorative. Crédit :Purdue University photo/Jared Pike
Qu'est-ce qui peut voler comme un oiseau et planer comme un insecte ?
Vos sympathiques colibris de quartier. Si les drones avaient ce combo, ils pourraient mieux manœuvrer à travers des bâtiments effondrés et d'autres espaces encombrés pour trouver des victimes piégées.
Des chercheurs de l'Université Purdue ont conçu des robots volants qui se comportent comme des colibris, entraînés par des algorithmes d'apprentissage automatique basés sur diverses techniques que l'oiseau utilise naturellement tous les jours.
Cela signifie qu'après avoir appris d'une simulation, le robot "sait" se déplacer tout seul comme le ferait un colibri, comme discerner quand effectuer une manœuvre d'évasion.
Intelligence artificielle, combiné avec des ailes battantes flexibles, permet également au robot de s'apprendre de nouveaux tours. Même si le robot ne peut pas encore voir, par exemple, il détecte en touchant des surfaces. Chaque contact modifie un courant électrique, que les chercheurs ont réalisé qu'ils pouvaient suivre.
"Le robot peut essentiellement créer une carte sans voir son environnement. Cela pourrait être utile dans une situation où le robot pourrait rechercher des victimes dans un endroit sombre - et cela signifie un capteur de moins à ajouter lorsque nous donnons au robot la possibilité de voir, " dit Xinyan Deng, professeur agrégé de génie mécanique à Purdue.
Les chercheurs présenteront leurs travaux le 20 mai à la conférence internationale IEEE 2019 sur la robotique et l'automatisation à Montréal.
Les drones ne peuvent pas être infiniment plus petits, en raison du fonctionnement de l'aérodynamique conventionnelle. Ils ne seraient pas en mesure de générer suffisamment de portance pour supporter leur poids.
Mais les colibris n'utilisent pas l'aérodynamique conventionnelle et leurs ailes sont résistantes. « La physique est tout simplement différente ; l'aérodynamique est intrinsèquement instable, avec des angles d'attaque élevés et une portance élevée. Cela permet aux plus petits, les animaux volants existent, et aussi possible pour nous de réduire les robots à ailes battantes, " dit Deng.
Les chercheurs tentent depuis des années de décoder le vol des colibris afin que les robots puissent voler là où les gros avions ne le peuvent pas. En 2011, la société AeroVironment, commandé par la DARPA, une agence au sein du département américain de la Défense, construit un colibri robotique plus lourd qu'un vrai mais pas aussi rapide, avec des commandes de vol de type hélicoptère et une maniabilité limitée. Il fallait qu'un humain soit derrière une télécommande à tout moment.
Le groupe de Deng et ses collaborateurs ont étudié les colibris eux-mêmes pendant plusieurs étés dans le Montana. Ils ont documenté les principales manœuvres des colibris, comme faire un virage rapide à 180 degrés, et les a traduits en algorithmes informatiques dont le robot pourrait apprendre lorsqu'il est connecté à une simulation.
Une étude plus approfondie de la physique des insectes et des colibris a permis aux chercheurs de Purdue de construire des robots plus petits que les colibris - et même aussi petits que les insectes - sans compromettre leur façon de voler. Plus la taille est petite, plus la fréquence de battement des ailes est élevée, et plus ils volent efficacement, dit Deng.
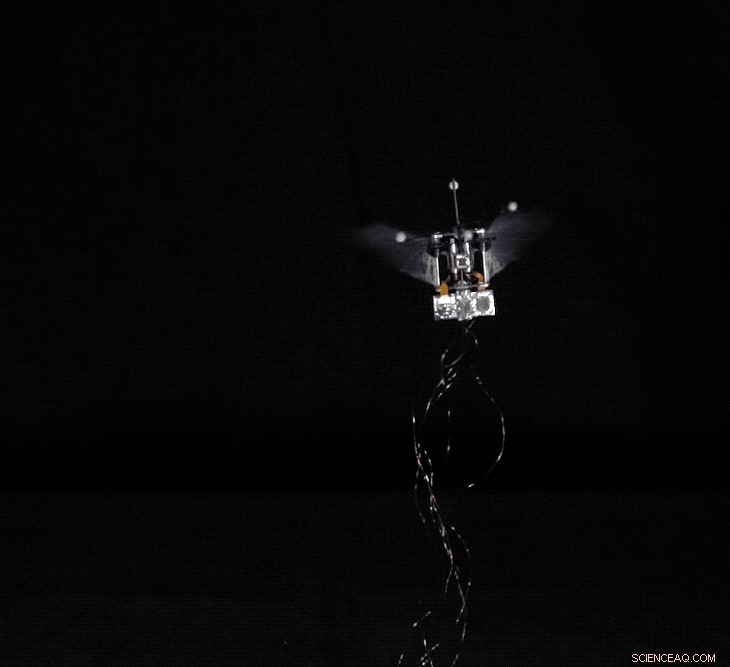
Ce colibri robotique vole tout seul tout en étant attaché à une source d'énergie, mais sera bientôt alimenté sur piles. Crédit : vidéo de l'Université Purdue/Laboratoire de biorobotique
Les robots ont des corps imprimés en 3D, ailes en fibre de carbone et membranes découpées au laser. Les chercheurs ont construit un robot colibri pesant 12 grammes - le poids du Magnificent Hummingbird adulte moyen - et un autre robot de la taille d'un insecte pesant 1 gramme. Le robot colibri peut soulever plus que son propre poids, jusqu'à 27 grammes.
La conception de leurs robots avec une portance plus élevée donne aux chercheurs plus de marge de manœuvre pour éventuellement ajouter une batterie et une technologie de détection, comme un appareil photo ou un GPS. Actuellement, le robot doit être attaché à une source d'énergie pendant qu'il vole, mais ce ne sera plus pour très longtemps, disent les chercheurs.
Les robots pourraient voler en silence comme le fait un vrai colibri, les rendant plus idéales pour les opérations secrètes. Et ils restent stables malgré les turbulences, ce que les chercheurs ont démontré en testant les ailes à l'échelle dynamique dans un réservoir d'huile.
Le robot ne nécessite que deux moteurs et peut contrôler chaque aile indépendamment l'une de l'autre, c'est ainsi que les animaux volants effectuent des manœuvres très agiles dans la nature.
"Un vrai colibri a plusieurs groupes de muscles pour effectuer des mouvements de puissance et de direction, mais un robot doit être le plus léger possible, pour que vous ayez des performances maximales avec un poids minimal, " dit Deng.
Les colibris robotiques ne seraient pas seulement utiles pour les missions de recherche et de sauvetage, mais aussi permettre aux biologistes d'étudier de manière plus fiable les colibris dans leur environnement naturel grâce aux sens d'un robot réaliste.
"Nous avons appris de la biologie pour construire le robot, et maintenant les découvertes biologiques peuvent se produire avec l'aide supplémentaire des robots, " dit Deng.
Des simulations de la technologie sont disponibles en open source sur https://github.com/purdue-biorobotics/flappy.
Les premières étapes des travaux, y compris les expériences sur les colibris du Montana en collaboration avec le groupe de Bret Tobalske à l'Université du Montana, ont été soutenus financièrement par la National Science Foundation.