Aucun assemblage requis :les chercheurs automatisent les conceptions microrobotiques
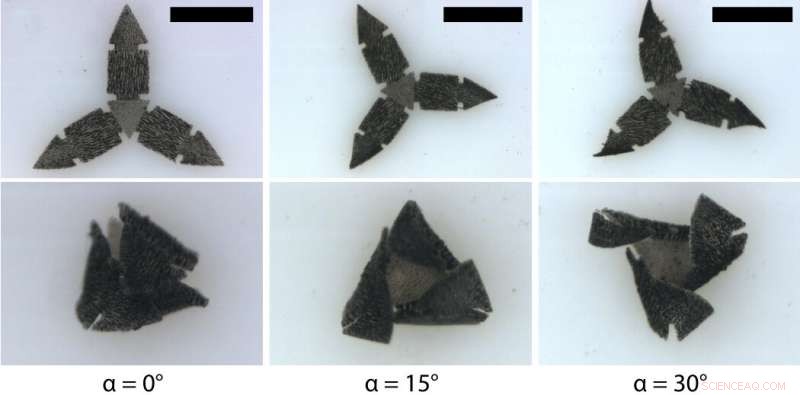
Images en vue de dessus des structures magnétiques douces à trois bras qui portent différents profils de magnétisation. Crédit :Xu et al., Sci. Robot. 4, eaav4494 (2019)
L'assemblage d'un microrobot nécessitait auparavant une pince à épiler, un microscope, mains fermes et au moins huit heures. Mais maintenant, des chercheurs en génie de l'Université de Toronto ont mis au point une méthode qui ne nécessite qu'une imprimante 3D et 20 minutes.
Dans le laboratoire du professeur Eric Diller, les chercheurs créent des microrobots magnétisés, de la taille d'une tête d'épingle, qui peuvent voyager à travers des vaisseaux et des organes remplis de liquide dans le corps humain. Diller et son équipe contrôlent le mouvement de ces microrobots sans fil à l'aide de champs magnétiques.
Chaque microrobot est construit en disposant avec précision des sections microscopiques d'aiguilles magnétiques au sommet d'un plat, matériau souple. Une fois déployé, les chercheurs appliquent des champs magnétiques pour inciter les microrobots à se déplacer avec un mouvement semblable à celui d'un ver à travers des canaux de fluide, ou fermer ses minuscules « mâchoires » mécaniques pour prélever un échantillon de tissu.
"Ces robots sont assez difficiles et demandent beaucoup de travail à fabriquer car le processus nécessite de la précision, " dit un étudiant diplômé, Tianqi Xu. "Également en raison de la nécessité d'un assemblage manuel, il est plus difficile de rendre ces robots plus petits, qui est un objectif majeur de notre recherche.
C'est pourquoi Xu et ses collègues de laboratoire ont développé une approche automatisée qui réduit considérablement le temps de conception et de développement, et étend les types de microrobots qu'ils peuvent fabriquer. Leurs conclusions ont été publiées aujourd'hui dans Robotique scientifique .