Crédit :Chen et al.
Nanogénérateurs, des outils technologiques capables de convertir l'énergie mécanique ou thermique en électricité, sont disponibles en trois conceptions clés :piézoélectrique, triboélectrique et pyroélectrique. Alors que les nanogénérateurs piézoélectriques et triboélectriques peuvent convertir l'énergie mécanique en électricité, les pyroélectriques fonctionnent en récupérant l'énergie thermique.
Au cours des dernières années, les nanogénérateurs triboélectriques sont devenus de plus en plus populaires pour les applications de récupération et de détection d'énergie. Jusque là, cependant, leurs performances dans les tâches de perception d'informations multidimensionnelles et de contrôle interactif ont été plutôt décevantes.
Des chercheurs de l'Université nationale de Singapour ont récemment développé des capteurs pour contrôler des objets dans l'espace 3D basés sur des nanogénérateurs triboélectriques. Ces capteurs, présenté dans un article publié dans Nano énergie , sont constitués d'une structure parallèle avec trois bandes de capteurs symétriques fixées sur sa base et une platine mobile qui leur est reliée.
"Avec le développement de la science, les technologies d'automatisation et de robotique ont pénétré de nombreux aspects des activités humaines, " Tao Chen, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Les robots ne sont pas seulement largement utilisés dans les lignes de production automatiques et les domaines du divertissement, mais peut aussi avoir des soins médicaux, application aérospatiale et militaire, ainsi que bien d'autres. Cependant, il y a inaccessible, défis imprévisibles dangereux ou inévitables pour les humains d'interagir ou d'effectuer des tâches complexes dans des environnements où l'équipement est maintenu sous vide, sous-marin, échelle spatiale et nanométrique, etc."
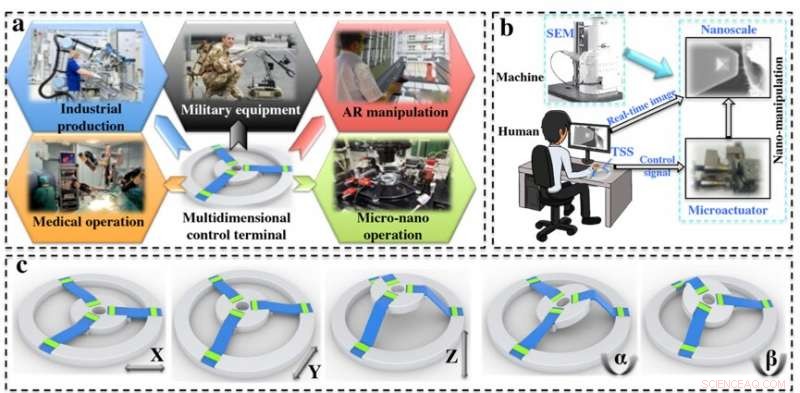
Pour permettre des interactions efficaces entre les humains et les systèmes automatisés, les chercheurs ont développé des terminaux de contrôle qui peuvent être actionnés de diverses manières, comme les écrans tactiles, claviers ou structures à bascule. Dans la plupart des cas, ces mécanismes de contrôle sont indirects, ils ont donc besoin d'analyses d'instructions et de calculs complexes pour correspondre à l'état de mouvement de l'objet à manipuler.
"Dans ce document, nous présentons un capteur à bande triboélectrique (TSS) ultra-étirable pour contrôler les attitudes de l'objet dans l'espace, " a expliqué Chen. " Notre TSS pourrait améliorer les performances des robots dans une variété d'environnements, y compris sous-marin, l'espace et plus encore."
Dans leur étude, Chen et ses collègues ont utilisé une bande tribolélectrique ultra-étirable comme capteur spatial, qui permet finalement aux robots de contrôler des objets dans l'espace 3D. En raison de l'effet de couplage de la triboélectrification et de l'induction électrostatique, la longueur de la bande change, avec le même point de contact avec le doigt générant des rapports de sortie de signal différents à partir de deux électrodes terminales (E1 et E2). Ces électrodes fonctionnent comme l'interface interactive pour la détection et le contrôle multidimensionnels.
"Une extrémité de l'électrode E1 de la bande est fixée, tandis que l'électrode E2 est mobile sous contrainte de traction par rapport à E1, " a déclaré Chen. " Le rapport de tension de sortie des deux électrodes (VE2/VE1) est obtenu lors du contact et de la séparation du doigt et du caoutchouc de silicone à une distance constante de E1. Par ailleurs, la bande est étirée d'une certaine longueur, le décrément du rapport de tension est déterminé lorsque nous retouchons la même position (point de référence) à une distance constante par rapport à l'électrode E1.
Au fur et à mesure que la longueur d'étirement de la bande augmente, ce rapport de tension diminue. Le mécanisme utilisé par Chen et ses collègues leur a permis de mesurer la longueur étendue du côté E2 de la bande, en touchant le point de référence qui est fixé à partir de E1. En d'autres termes, le déplacement de leur bande lors de son étirement, sa vitesse d'étirement et l'accélération de l'électrode E2 peuvent toutes être mesurées avec une fréquence de contact constante.
"Le principe de détection du capteur utilisé ici est principalement de déterminer la longueur en comparant le rapport de tension entre les deux électrodes, " dit Chen. " En conséquence, le mécanisme de détection utilisant la méthode du rapport de tension évite l'influence de l'humidité environnementale et de la force inégale. Donc, c'est une méthode de détection efficace pour éviter l'instabilité et les interférences."
Chen et ses collègues ont introduit une nouvelle méthode de détection d'objets basée sur un capteur de mouvement longitudinal qui utilise les rapports de tension générés. Dans leur étude, ils ont utilisé trois capteurs flexibles auto-alimentés pour réaliser une projection de positionnement 5D dans l'espace. Leur méthode est plus simple et plus intuitive que les structures traditionnelles rigides (non extensibles) sous-jacentes, mais il ajoute également des dimensions d'espace.
"Maintenant, le fonctionnement de l'échelle nanométrique à l'aide du mode poignée ou clé n'est pas intuitif, ", a déclaré Chen. "Notre approche peut être plus flexible et intuitive pour les interactions homme-machine à l'échelle nanométrique."
Dans une démonstration préliminaire, les chercheurs ont utilisé leur dispositif TSS comme terminal humain-nanomachine pour contrôler leur nanomanipulateur dans une tâche de microscopie électronique à balayage (MEB). Dans cette tâche, leur dispositif leur a permis d'opérer les nanotubes de carbone et de mener à bien l'extraction des nanotubes de carbone.
« Les résultats de micro-nano manipulation que nous avons collectés confirment les excellentes performances du dispositif TSS sur les applications perceptives et de contrôle, qui concernent des domaines tels que la robotique, VR et IoT, " Chen a dit. " Dans une étude de suivi, nous prévoyons de faire des recherches sur la manette bimanuelle, pour obtenir une interaction homme-machine plus intuitive et plus pratique."
© 2019 Réseau Science X