Crédit :Massachusetts Institute of Technology
il y a 50 ans, le premier bras de robot industriel appelé Unimate a assemblé un simple petit-déjeuner de pain grillé, café, et champagne. Bien que cela ait pu ressembler à un exploit sans faille, chaque mouvement et placement a été codé avec une attention particulière.
Même avec les robots plus intelligents et adaptatifs d'aujourd'hui, cette tâche reste difficile pour les machines aux mains rigides. Ils ont tendance à fonctionner uniquement dans des environnements structurés avec des formes et des emplacements prédéfinis, et ne peuvent généralement pas faire face aux incertitudes de placement ou de forme.
Dans les années récentes, bien que, les roboticiens se sont attaqués à ce problème en fabriquant des doigts avec des souple, matériaux comme le caoutchouc. Cette souplesse permet à ces robots souples de ramasser n'importe quoi, des raisins aux boîtes et aux bouteilles d'eau vides, mais ils sont toujours incapables de manipuler des objets volumineux ou lourds.
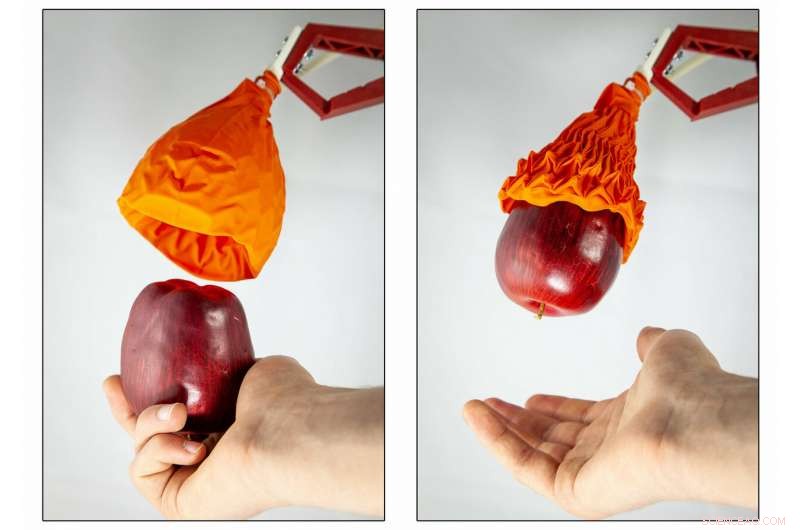
Pour donner un petit coup de main à ces robots mous, des chercheurs du MIT et de Harvard ont développé une nouvelle pince à la fois souple et solide :une structure en origami en forme de cône qui s'effondre sur les objets, un peu comme un piège à mouches de Vénus, pour ramasser des objets jusqu'à 100 fois son poids. Ce mouvement permet à la pince de saisir une gamme beaucoup plus large d'objets - tels que des boîtes de soupe, marteaux, verres à vin, drones, et même un seul fleuron de brocoli.
"L'un de mes objectifs est de créer un robot qui peut automatiquement emballer vos courses pour vous, " dit Daniela Rus, professeur au MIT, directeur du Laboratoire d'informatique et d'intelligence artificielle (CSAIL) du MIT, et l'un des auteurs principaux d'un nouvel article sur le projet.
"Les approches précédentes du problème d'emballage ne pouvaient traiter que des classes d'objets très limitées - des objets très légers ou des objets conformes à des formes telles que des boîtes et des cylindres, mais avec le système de préhension Magic Ball, nous avons montré que nous pouvons effectuer des tâches de sélection et de placement pour une grande variété d'articles allant des bouteilles de vin au brocoli, raisins et œufs, " dit Rus. " En d'autres termes, objets lourds et objets légers. Des objets délicats, ou solide, ou qui ont des formes régulières ou libres."
Le projet est l'un des nombreux projets de ces dernières années qui ont poussé les chercheurs à sortir des sentiers battus avec la conception de robots. Pinces en forme de boule, par exemple, peut manipuler une plus large gamme d'objets que les doigts, mais ont toujours le problème des angles limités. Les doigts robotiques plus doux utilisent généralement de l'air comprimé, mais ne sont pas assez forts pour ramasser des objets plus lourds.
La structure de cette nouvelle pince, pendant ce temps, prend une tout autre forme. En forme de cône, creux, et sous vide, l'appareil a été inspiré par la "boule magique origami" et peut envelopper un objet entier et le ramasser avec succès.
La pince a trois parties :la structure squelette à base d'origami, la peau hermétique pour envelopper la structure, et le connecteur. L'équipe l'a créé à l'aide d'un moule en caoutchouc mécanique et d'un plastique thermorétractable spécial qui se replie automatiquement à haute température.
Le squelette de la boule magique est recouvert soit d'un ballon en caoutchouc, soit d'une fine feuille de tissu, un peu comme les recherches précédentes de l'équipe sur les muscles artificiels inspirés de l'origami (FOAM) qui consistait en une peau hermétique entourant un squelette pliable et fluide.
L'équipe a utilisé la pince avec un robot standard pour tester sa force sur différents objets. La pince pouvait saisir et soulever des objets à 70 pour cent de son diamètre, ce qui lui a permis de ramasser et de tenir une variété d'aliments mous sans causer de dommages. Il pouvait également ramasser des bouteilles pesant plus de quatre livres.
« Des entreprises comme Amazon et JD veulent pouvoir ramasser un plus large éventail d'objets délicats ou de forme irrégulière, mais ne peut pas avec des pinces à doigts et à ventouse, " dit Shuguang Li, un post-doctorat conjoint au MIT CSAIL et à la John A. Paulson School of Engineering and Applied Sciences (SEAS) de Harvard. "Les ventouses ne peuvent rien ramasser avec des trous - et elles auraient besoin de quelque chose de beaucoup plus fort qu'une pince à doigts souples."
Le robot fonctionne actuellement mieux avec des objets cylindriques comme des bouteilles ou des canettes, ce qui pourrait un jour en faire un atout pour les lignes de production des usines. Sans surprise, la forme de la pince rend plus difficile la saisie d'un objet plat, comme un sandwich ou un livre.
"L'une des principales caractéristiques de cette approche de la construction du manipulateur est sa simplicité, " dit Robert Wood, co-auteur et professeur à la Harvard's School of Engineering et au Wyss Institute for Biologically Inspired Engineering. « Les matériaux et les stratégies de fabrication utilisés nous permettent de prototyper rapidement de nouvelles pinces, personnalisé à l'objet ou à l'environnement selon les besoins."
À l'avenir, l'équipe espère essayer de résoudre le problème de l'angle et de l'orientation en ajoutant une vision par ordinateur qui permettrait à la pince de « voir », et permettent de saisir des parties spécifiques d'objets.
"C'est un appareil très intelligent qui utilise la puissance de l'impression 3D, un aspirateur, et la robotique douce pour aborder le problème de la préhension d'une toute nouvelle manière, " dit Michael Wehner, un professeur assistant de robotique à l'UC-Santa Cruz qui n'était pas impliqué dans le projet. "Dans les années à venir, Je pouvais imaginer voir des robots mous assez doux et adroits pour cueillir une rose, assez solide pour soulever en toute sécurité un patient hospitalisé. »