Des chercheurs de l'Université de Washington ont développé un système robotique qui peut nourrir les personnes qui ont besoin de quelqu'un pour les aider à manger. Ici, un volontaire montre comment fonctionne le système. Crédit :Eric Johnson/Université de Washington
Environ 1 million d'adultes aux États-Unis ont besoin de quelqu'un pour les aider à manger, selon les données du recensement de 2010. C'est une tâche longue et souvent délicate, un fait en grande partie par nécessité plutôt que par choix.
Des chercheurs de l'Université de Washington travaillent sur un système robotique qui peut faciliter les choses. Après avoir identifié différents aliments dans une assiette, le robot peut élaborer une stratégie sur la façon d'utiliser une fourchette pour ramasser et livrer la bouchée désirée à la bouche d'une personne.
L'équipe a publié ses résultats dans une série d'articles :l'un a été récemment publié dans Lettres de robotique et d'automatisation IEEE , tandis que l'autre sera présenté le 13 mars à la conférence internationale ACM/IEEE sur l'interaction homme-robot en Corée du Sud.
"Être dépendant d'un soignant pour nourrir chaque bouchée chaque jour enlève le sentiment d'indépendance d'une personne, " a déclaré l'auteur correspondant Siddhartha Srinivasa, le Boeing Endowed Professor à la Paul G. Allen School of Computer Science &Engineering de l'UW. "Notre objectif avec ce projet est de donner aux gens un peu plus de contrôle sur leur vie."
L'idée était de développer un système d'alimentation autonome qui serait attaché aux fauteuils roulants des gens et nourrirait les gens avec tout ce qu'ils voulaient manger.
« Quand nous avons commencé le projet, nous nous sommes rendus compte :il y a tellement de façons pour les gens de manger un morceau de nourriture en fonction de sa taille, forme ou consistance. Comment commençons-nous ?", a déclaré le co-auteur Tapomayukh Bhattacharjee, un associé de recherche postdoctoral à la Allen School. "Nous avons donc mis en place une expérience pour voir comment les humains mangent des aliments courants comme les raisins et les carottes."
Les chercheurs ont disposé des assiettes avec une douzaine d'aliments différents, allant des carottes dures aux bananes molles. Les assiettes comprenaient également des aliments comme des tomates et des raisins, qui ont une peau dure et un intérieur doux. Ensuite, l'équipe a donné une fourchette aux volontaires et leur a demandé de ramasser différents morceaux de nourriture et de les donner à manger à un mannequin. La fourchette contenait un capteur pour mesurer la force que les gens utilisaient lorsqu'ils ramassaient de la nourriture.
Les volontaires ont utilisé diverses stratégies pour ramasser des aliments de consistance différente. Par exemple, les gens embrochaient des articles mous comme des bananes en biais pour les empêcher de glisser de la fourchette. Pour les articles comme les carottes et les raisins, les volontaires avaient tendance à utiliser des mouvements de remuement pour augmenter la force et transpercer chaque morsure.
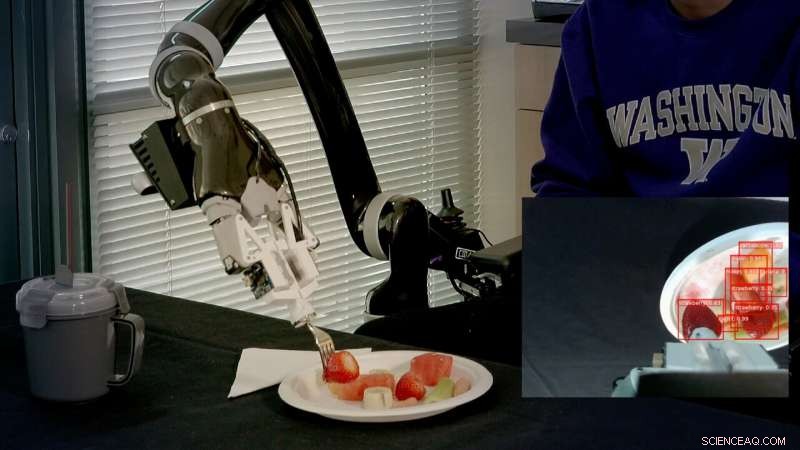
L'algorithme de détection d'objets, appelé RetinaNet, scanne la plaque, identifie les types de nourriture dessus et place un cadre autour de chaque article. Crédit :Eric Johnson/Université de Washington
« Les gens semblaient utiliser différentes stratégies non seulement en fonction de la taille et de la forme de la nourriture, mais aussi de sa dureté ou de sa douceur. Mais devons-nous réellement le faire ? » dit Bhattacharjee. "Nous avons décidé de faire une expérience avec le robot où nous avons fait des brochettes de nourriture jusqu'à ce que la fourchette atteigne une certaine profondeur à l'intérieur, quel que soit le type de nourriture."
Le robot a utilisé la même stratégie de force et d'embrochement pour essayer de ramasser tous les morceaux de nourriture, quelle que soit leur consistance. Il était capable de ramasser des aliments durs, mais il a eu du mal avec les aliments mous et ceux à la peau dure et à l'intérieur mou. Alors des robots, comme les humains, doivent ajuster la force et l'angle qu'ils utilisent pour ramasser différents types d'aliments.
L'équipe a également noté que les actes consistant à ramasser un morceau de nourriture et à le donner à quelqu'un ne sont pas indépendants les uns des autres. Les bénévoles orientaient souvent spécifiquement un morceau de nourriture sur la fourchette afin qu'il puisse être mangé facilement.
"Vous pouvez ramasser un bâton de carotte en l'embrochant au centre du bâton, mais il sera difficile pour une personne de manger, " dit Bhattacharjee. " D'un autre côté, si vous la ramassez à l'une des extrémités et que vous inclinez ensuite la carotte vers la bouche de quelqu'un, c'est plus facile de prendre une bouchée."
Concevoir une stratégie de brochette et d'alimentation qui change en fonction de l'aliment, les chercheurs ont combiné deux algorithmes différents. Ils ont d'abord utilisé un algorithme de détection d'objets appelé RetinaNet, qui scanne la plaque, identifie les types de nourriture dessus et place un cadre autour de chaque article.
Puis ils ont développé SPNet, un algorithme qui examine le type de nourriture dans un cadre spécifique et indique au robot la meilleure façon de ramasser la nourriture. Par exemple, SPNet dit au robot d'embrocher une fraise ou une tranche de banane au milieu, et piquer des carottes à l'une des deux extrémités.
L'équipe a demandé au robot de ramasser des morceaux de nourriture et de les donner à des volontaires à l'aide de SPNet ou d'une stratégie plus uniforme :une approche qui embroche le centre de chaque aliment, quel qu'il soit. Les différentes stratégies de SPNet ont surperformé ou ont obtenu les mêmes performances que l'approche uniforme pour tous les aliments.
"De nombreux défis d'ingénierie ne sont pas pointilleux sur leurs solutions, mais cette recherche est très intimement liée aux gens, " A déclaré Srinivasa. " Si nous ne prenons pas en compte combien il est facile pour une personne de prendre une bouchée, alors les gens pourraient ne pas être en mesure d'utiliser notre système. Il y a un univers de types de nourriture là-bas, notre plus grand défi est donc de développer des stratégies qui peuvent les traiter tous. »
L'équipe travaille actuellement avec le Taskar Center for Accessible Technology pour obtenir les commentaires des soignants et des patients des résidences-services sur la façon d'améliorer le système pour répondre aux besoins des gens.
"En fin de compte, notre objectif est que notre robot aide les gens à déjeuner ou dîner par eux-mêmes, ", a déclaré Srinivasa. "Mais il ne s'agit pas de remplacer les soignants :nous voulons les responsabiliser. Avec un robot pour vous aider, le soignant peut mettre en place le plateau, et ensuite faire autre chose pendant que la personne mange."