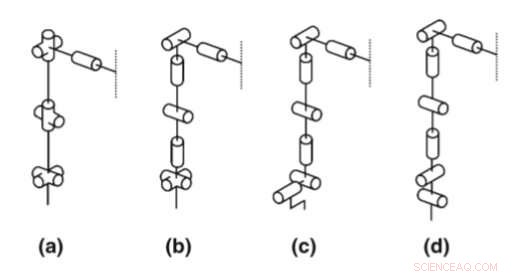
Visualisation de la configuration de l'articulation du bras droit d'un certain nombre de robots dotés de 7 bras DOF. La ligne pointillée représente la ligne médiane du corps. un ASIMO, b ARMAR III, c WABIAN-2, d iCub Crédit :Van de Perre et al.
Les robots sociaux sont conçus pour communiquer naturellement avec les êtres humains, en les assistant dans diverses tâches. L'utilisation efficace des gestes pourrait grandement améliorer les interactions robot-humain, permettant aux robots de communiquer à la fois verbalement et non verbalement.
La conception de la plupart des robots sociaux est inspirée du corps humain, car cela facilite la reproduction de gestes et de comportements humains. Cependant, différents robots peuvent avoir des morphologies différentes, qui leur permettent d'aborder au mieux les tâches qu'ils sont censés accomplir.
Chercheurs de la Vrije Universiteit Brussel, en Belgique, ont récemment introduit une nouvelle approche basée sur une méthode gestuelle générique pour étudier l'influence de différents aspects de la conception. Leur papier, publié sur Springer's Revue internationale de robotique sociale , présente un cadre qui génère rapidement des gestes qui correspondent à la configuration spécifique d'un robot.
"Dans ce document, nous proposons une nouvelle méthodologie pour étudier l'influence de différents aspects de la conception basée sur une méthode gestuelle générique, " écrivent les chercheurs dans leur article. " La méthode gestuelle a été développée pour surmonter les difficultés de transfert de gestes vers différents robots, apporter une solution au problème de correspondance."
La méthode conçue par cette équipe de chercheurs pourrait surmonter les difficultés de transfert de gestes vers des robots de formes et de configurations différentes. Les utilisateurs peuvent saisir les informations morphologiques d'un robot et l'outil utilisera ces données pour calculer les gestes de ce robot.
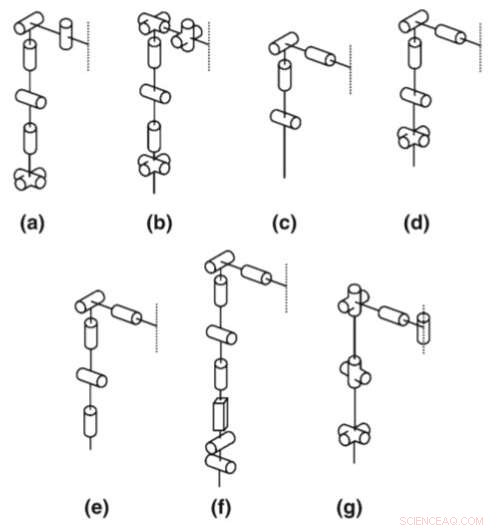
Visualisation de la configuration de l'articulation du bras droit d'un certain nombre de robots avec différentes morphologies de bras. La ligne pointillée représente la ligne médiane du corps. une Pyrène, b WE-4RII, c Robovie, d KHR-3, e NAO, f R1, g ARMAR-IV. Crédit :Van de Perre et al.
"Un petit ensemble d'informations morphologiques, saisie par l'utilisateur, est utilisé pour évaluer le framework générique du logiciel à l'exécution, " les chercheurs ont expliqué. " Par conséquent, les gestes peuvent être calculés rapidement et facilement pour une configuration de robot souhaitée. En générant un ensemble de gestes pour différentes morphologies, l'importance d'articulations spécifiques et leur influence sur une série de postures et de gestes peuvent être étudiées."
Pour s'assurer que leur méthode serait applicable à différents types de robots, les chercheurs se sont inspirés d'un modèle de base humaine. Ce modèle se compose de différentes chaînes et blocs, qui sont utilisées pour modéliser les différentes possibilités de rotation des humains. Les chercheurs ont attribué un cadre de référence à chaque bloc articulaire en utilisant le modèle de base humaine comme référence pour construire le cadre général de leur méthode.
"Pour générer des gestes pour un certain modèle de robot, la méthode utilise en entrée les paramètres Denavit-Hartenberg (DH) de la configuration, par lequel les différentes articulations du robot sont regroupées en chaînes et blocs du modèle de base humain, " les chercheurs ont expliqué dans leur article. " Au moment de l'exécution, le cadre générique de la méthode est évalué à partir de ces informations, et en tant que tel, adapté au robot considéré."
Comme différentes caractéristiques sont importantes pour différents types de gestes, la méthode imaginée par les chercheurs est conçue pour fonctionner selon deux modes différents, à savoir le mode bloc et le mode effecteur final. Le mode bloc est utilisé pour calculer des gestes tels que des expressions émotionnelles dans les cas où le placement global du bras est crucial. Le mode effecteur final, d'autre part, calcule les gestes dans les situations où la position de l'effecteur est importante, comme lors de la manipulation ou du pointage d'objets.
"La méthode gestuelle prouve son utilité dans le processus de conception de robots sociaux en fournissant une impression de la quantité nécessaire de complexité nécessaire pour une tâche spécifiée, et peut donner des informations intéressantes sur la plage d'angle de joint requise, ", ont déclaré les chercheurs.
Dans leur étude, les chercheurs ont appliqué leur méthode au modèle virtuel d'un robot appelé Probo. Ils ont utilisé cet exemple pour illustrer comment leur méthode pourrait aider à étudier la collocation de différentes articulations et les plages d'angles articulaires dans les gestes. À l'avenir, leur approche pourrait aider au développement de robots sociaux capables d'effectuer des gestes naturels adaptés à leur morphologie et à leur application.
© 2019 Réseau Science X