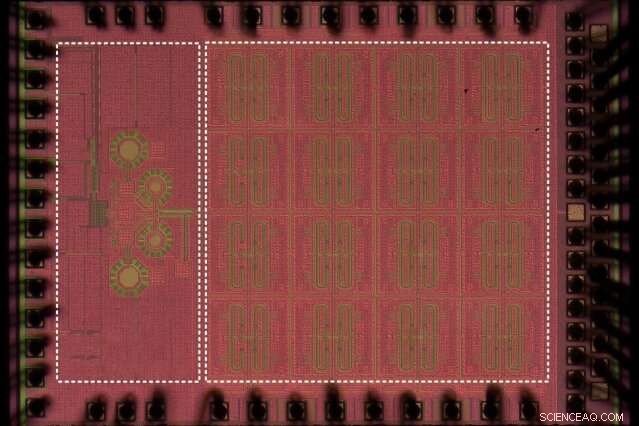
Des chercheurs du MIT ont développé une puce qui exploite les longueurs d'onde inférieures au térahertz pour la reconnaissance d'objets, qui pourrait être combiné avec des capteurs d'image basés sur la lumière pour aider à diriger les voitures sans conducteur à travers le brouillard. Crédit :Massachusetts Institute of Technology
Les véhicules autonomes reposant sur des capteurs d'image basés sur la lumière ont souvent du mal à voir à travers des conditions aveuglantes, comme le brouillard. Mais les chercheurs du MIT ont développé un système de réception de rayonnements inférieurs à térahertz qui pourrait aider à diriger les voitures sans conducteur lorsque les méthodes traditionnelles échouent.
Longueurs d'onde sub-térahertz, qui se situent entre les rayonnements micro-ondes et infrarouges sur le spectre électromagnétique, peut être détecté facilement à travers le brouillard et les nuages de poussière, alors que les systèmes d'imagerie LiDAR basés sur l'infrarouge utilisés dans les véhicules autonomes ont du mal. Pour détecter des objets, un système d'imagerie sub-térahertz envoie un signal initial via un émetteur; un récepteur mesure alors l'absorption et la réflexion des longueurs d'onde sub-térahertz rebondissantes. Cela envoie un signal à un processeur qui recrée une image de l'objet.
Mais la mise en œuvre de capteurs inférieurs à térahertz dans des voitures sans conducteur est un défi. Sensible, une reconnaissance d'objet précise nécessite un signal de sortie en bande de base puissant du récepteur au processeur. Systèmes traditionnels, constitué de composants discrets qui produisent de tels signaux, sont grandes et chères. Plus petite, des réseaux de capteurs sur puce existent, mais ils produisent des signaux faibles.
Dans un article publié en ligne le 8 février par le Journal IEEE des circuits à semi-conducteurs , les chercheurs décrivent un réseau de réception sous-térahertz sur une puce qui est des ordres de grandeur plus sensibles, ce qui signifie qu'il peut mieux capturer et interpréter les longueurs d'onde inférieures au térahertz en présence de beaucoup de bruit de signal.
Pour y parvenir, ils ont mis en œuvre un schéma de pixels indépendants de mélange de signaux, appelés "détecteurs hétérodynes", qui sont généralement très difficiles à intégrer de manière dense dans les puces. Les chercheurs ont considérablement réduit la taille des détecteurs hétérodynes afin que bon nombre d'entre eux puissent s'intégrer dans une puce. L'astuce consistait à créer un compact, composant polyvalent qui peut simultanément sous-mixer les signaux d'entrée, synchroniser le tableau de pixels, et produire de forts signaux de bande de base de sortie.
Les chercheurs ont construit un prototype, qui a une matrice de 32 pixels intégrée sur un appareil de 1,2 millimètre carré. Les pixels sont d'environ 4, 300 fois plus sensible que les pixels des meilleurs capteurs à matrice sub-térahertz sur puce d'aujourd'hui. Avec un peu plus de développement, la puce pourrait potentiellement être utilisée dans les voitures sans conducteur et les robots autonomes.
"Une grande motivation pour ce travail est d'avoir de meilleurs "yeux électriques" pour les véhicules autonomes et les drones, " dit le co-auteur Ruonan Han, professeur agrégé de génie électrique et d'informatique, et directeur du Terahertz Integrated Electronics Group dans les laboratoires de technologie de microsystèmes (MTL) du MIT. "Notre low-cost, Les capteurs sous-térahertz sur puce joueront un rôle complémentaire au LiDAR lorsque l'environnement est rude."
Le premier auteur Zhi Hu et le co-auteur Cheng Wang rejoignent Han sur l'article, les deux Ph.D. étudiants du département de génie électrique et d'informatique travaillant dans le groupe de recherche de Han.
Conception décentralisée
La clé de la conception est ce que les chercheurs appellent la « décentralisation ». Dans cette conception, un seul pixel - appelé pixel "hétérodyne" - génère le battement de fréquence (la différence de fréquence entre deux signaux entrants sub-térahertz) et "l'oscillation locale, " un signal électrique qui modifie la fréquence d'une fréquence d'entrée. Ce processus de " sous-mixage " produit un signal dans la gamme des mégahertz qui peut être facilement interprété par un processeur de bande de base.
Le signal de sortie peut être utilisé pour calculer la distance des objets, similaire à la façon dont LiDAR calcule le temps qu'il faut à un laser pour frapper un objet et rebondir. En outre, combiner les signaux de sortie d'un réseau de pixels, et diriger les pixels dans une certaine direction, peut permettre des images haute résolution d'une scène. Cela permet non seulement la détection mais aussi la reconnaissance d'objets, ce qui est essentiel dans les véhicules autonomes et les robots.
Les matrices de pixels hétérodynes ne fonctionnent que lorsque les signaux d'oscillation locaux de tous les pixels sont synchronisés, ce qui signifie qu'une technique de synchronisation du signal est nécessaire. Les conceptions centralisées comprennent un seul concentrateur qui partage les signaux d'oscillation locaux avec tous les pixels.
Ces conceptions sont généralement utilisées par des récepteurs de fréquences inférieures, et peut causer des problèmes dans les bandes de fréquences inférieures au térahertz, où la génération d'un signal haute puissance à partir d'un seul concentrateur est notoirement difficile. Au fur et à mesure que la baie s'agrandit, la puissance partagée par chaque pixel diminue, réduire la puissance du signal de sortie en bande de base, qui dépend fortement de la puissance du signal d'oscillation locale. Par conséquent, un signal généré par chaque pixel peut être très faible, conduisant à une faible sensibilité. Certains capteurs sur puce ont commencé à utiliser cette conception, mais sont limités à huit pixels.
La conception décentralisée des chercheurs s'attaque à ce compromis de sensibilité à l'échelle. Chaque pixel génère son propre signal d'oscillation locale, utilisé pour recevoir et sous-mixer le signal entrant. En outre, un coupleur intégré synchronise son signal d'oscillation local avec celui de son voisin. Cela donne à chaque pixel plus de puissance de sortie, puisque le signal d'oscillation locale ne provient pas d'un hub global.
Une bonne analogie pour la nouvelle conception décentralisée est un système d'irrigation, dit Han. Un système d'irrigation traditionnel a une pompe qui dirige un puissant flux d'eau à travers un réseau de canalisations qui distribue l'eau à de nombreux sites d'arrosage. Chaque arroseur crache de l'eau dont le débit est beaucoup plus faible que le débit initial de la pompe. Si vous voulez que les arroseurs pulsent exactement au même rythme, cela nécessiterait un autre système de contrôle.
La conception des chercheurs, d'autre part, donne à chaque site sa propre pompe à eau, éliminant le besoin de raccorder des pipelines, et donne à chaque arroseur sa propre sortie d'eau puissante. Chaque arroseur communique également avec son voisin pour synchroniser ses pulsations. "Avec notre conception, il n'y a pratiquement aucune limite pour l'évolutivité, " dit Han. " Vous pouvez avoir autant de sites que vous voulez, et chaque site pompe toujours la même quantité d'eau… et toutes les pompes fonctionnent ensemble."
La nouvelle architecture, cependant, rend potentiellement l'empreinte de chaque pixel beaucoup plus grande, qui pose un grand défi à la grande échelle, intégration haute densité à la manière d'un réseau. Dans leur conception, les chercheurs ont combiné diverses fonctions de quatre composants traditionnellement séparés :antenne, downmixer, oscillateur, et coupleur - en un seul composant "multitâche" attribué à chaque pixel. Cela permet une conception décentralisée de 32 pixels.
"Nous avons conçu un composant multifonctionnel pour une conception [décentralisée] sur une puce et combinons quelques structures discrètes pour réduire la taille de chaque pixel, " dit Hu. " Même si chaque pixel effectue des opérations compliquées, il garde sa compacité, nous pouvons donc toujours avoir un réseau dense à grande échelle. »
Guidé par les fréquences
Pour que le système mesure la distance d'un objet, la fréquence du signal d'oscillation locale doit être stable.
À cette fin, les chercheurs ont incorporé dans leur puce un composant appelé boucle à verrouillage de phase, qui verrouille la fréquence sub-térahertz de tous les 32 signaux d'oscillation locaux à une stabilité, référence basse fréquence. Parce que les pixels sont couplés, leurs signaux d'oscillation locaux partagent tous identiques, phase et fréquence à haute stabilité. Cela garantit que des informations significatives peuvent être extraites des signaux de sortie en bande de base. Toute cette architecture minimise la perte de signal et maximise le contrôle.
"En résumé, nous obtenons un tableau cohérent, en même temps avec une puissance d'oscillation locale très élevée pour chaque pixel, ainsi chaque pixel atteint une sensibilité élevée, " dit Hu.
Cette histoire est republiée avec l'aimable autorisation de MIT News (web.mit.edu/newsoffice/), un site populaire qui couvre l'actualité de la recherche du MIT, innovation et enseignement.














