Une équipe internationale de chercheurs a développé un système de perception pour les robots mous inspiré de la façon dont les humains traitent les informations sur leur propre corps dans l'espace et en relation avec d'autres objets et personnes. Ils décrivent le système, qui comprend un système de capture de mouvement, capteurs souples, un réseau de neurones, et un doigt robotique doux, dans le numéro du 30 janvier de Robotique scientifique . Crédit :Université de Californie à San Diego
Une équipe internationale de chercheurs a développé un système de perception pour les robots mous inspiré de la façon dont les humains traitent les informations sur leur propre corps dans l'espace et en relation avec d'autres objets et personnes. Ils décrivent le système, qui comprend un système de capture de mouvement, capteurs souples, un réseau de neurones, et un doigt robotique doux, dans le numéro du 30 janvier de Robotique scientifique .
L'objectif ultime des chercheurs est de construire un système capable de prédire les mouvements et l'état interne d'un robot sans s'appuyer sur des capteurs externes, tout comme les humains le font tous les jours. Dans leurs Robotique scientifique papier, ils montrent qu'ils ont atteint cet objectif pour un doigt robotique souple. Le travail a des applications dans l'interaction homme-robot et la robotique portable, ainsi que des dispositifs souples pour corriger les troubles affectant les muscles et les os.
Le système est destiné à imiter les différents composants nécessaires aux humains pour naviguer dans leur environnement :le système de capture de mouvement représente la vision; le réseau neuronal remplace les fonctions cérébrales; les capteurs tactiles; et le doigt pour le corps en interaction avec le monde extérieur. Le système de capture de mouvement est là pour entraîner le réseau neuronal et peut être supprimé une fois l'entraînement terminé.
"Les avantages de notre approche sont la capacité de prédire les mouvements et les forces complexes que subit le robot doux (ce qui est difficile avec les méthodes traditionnelles) et le fait qu'elle peut être appliquée à plusieurs types d'actionneurs et de capteurs, " a déclaré Michael Tolley, professeur de génie mécanique et aérospatial à l'Université de Californie à San Diego et auteur principal de l'article. "Notre méthode comprend également des capteurs redondants, ce qui améliore la robustesse globale de nos prédictions."

Le doigt robotique souple fournit des informations haptiques et de mouvement au système. Crédit :Université de Californie à San Diego
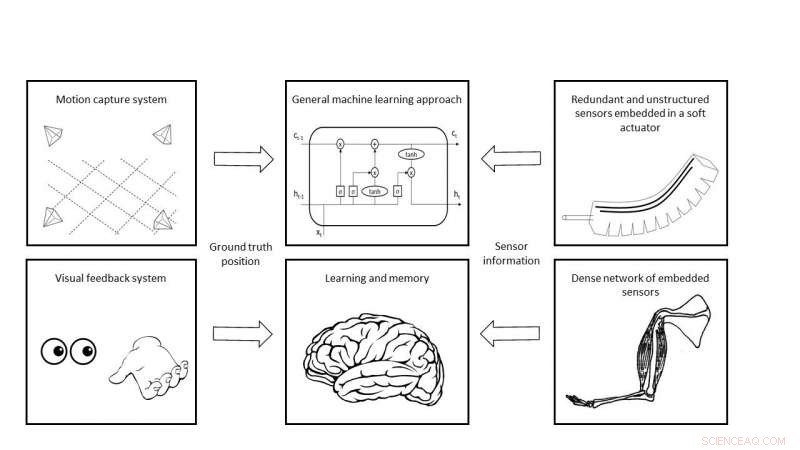
Vue d'ensemble de l'architecture de modélisation et de son parallèle avec le système perceptif humain. Crédit :Université de Californie à San Diego
Les chercheurs ont intégré arbitrairement des capteurs de contrainte souples dans le doigt robotique souple, sachant qu'ils seraient sensibles à une grande variété de mouvements, et utilisé des techniques d'apprentissage automatique pour interpréter les signaux des capteurs. Cela a permis à l'équipe, qui comprend des chercheurs du Bioinspired Robotics and Design Lab de l'UC San Diego, pour prédire les forces appliquées, et mouvements de, le doigt. Cette approche permettra aux chercheurs de développer des modèles capables de prédire les forces et les déformations subies par les systèmes robotiques souples lorsqu'ils se déplacent.