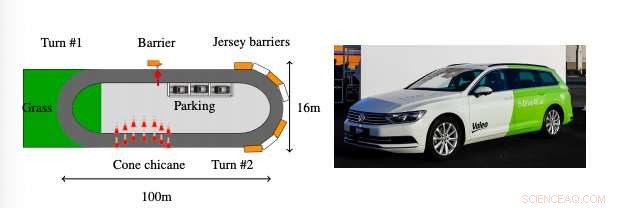
Piste d'essai (à gauche) et voiture de démonstration utilisée (à droite). Crédit :Wirbel et al.
Les chercheurs de Valeo, une entreprise technologique spécialisée dans l'innovation automobile, ont récemment développé un système d'apprentissage d'imitation de bout en bout pour le contrôle de la vitesse des voitures. Leur approche, décrit dans un article prépublié sur arXiv, utilise un réseau de neurones à mémoire à long court terme (LSTM), un type de réseau neuronal récurrent (RNN) qui peut apprendre des dépendances à long terme.
« Valeo est le leader mondial des capteurs, les oreilles et les yeux des voitures autonomes, et a déjà réalisé plusieurs premières mondiales, comme la récente expérimentation de notre véhicule Valeo Drive4U, la première voiture autonome en démonstration dans les rues de Paris, " Émilie Wirbel, l'un des chercheurs qui a mené l'étude, a déclaré TechXplore. "Mon équipe et moi travaillons dans l'un des 56 centres de recherche et développement de l'entreprise, étudier comment l'apprentissage en profondeur peut être utilisé pour obtenir une meilleure décision et un meilleur contrôle des voitures autonomes. L'objectif de cette recherche était de prouver qu'il est possible de gérer des situations complexes pouvant être rencontrées en milieu urbain en utilisant uniquement des caméras et en apprenant de ce qu'un conducteur humain peut faire."
Le nouveau système développé par Wirbel et ses collègues utilise un réseau de neurones artificiels (ANN) qui repose sur des techniques d'apprentissage en profondeur. Le réseau est alimenté de démonstrations d'un être humain conduisant une voiture qui sont prises à partir d'une caméra frontale et ressemblent donc étroitement à ce que la personne voyait en conduisant.
Le réseau de neurones est alors entraîné à imiter les actions du conducteur, en se concentrant particulièrement sur la reproduction de la vitesse actuelle de la voiture. Par exemple, lorsqu'une image d'entrée contient un panneau de limitation de vitesse à 50 km/h, le réseau veille à ce que la voiture ne dépasse pas les 50 km/h.
"Quand il y a une autre voiture devant nous, un conducteur humain ralentira en conséquence et le réseau devrait apprendre à faire de même, " a expliqué Wirbel. " Notre approche essaie de reproduire la façon dont un humain apprend et conduit. Le réseau ne reçoit que des informations de la caméra frontale et n'a pas besoin de perception explicite, par exemple, liés aux feux de circulation ou aux voies, tout comme un conducteur humain n'a pas de modèle explicite de l'emplacement exact des lignes et de leur forme."
Après avoir entraîné leur réseau de neurones, Wirbel et ses collègues l'ont testé dans un environnement de simulation puis l'ont intégré dans une vraie voiture, évaluer ses performances sur une piste d'essai difficile. Ils ont découvert que leur système réagissait efficacement à des situations complexes, contrôler la vitesse de la voiture si nécessaire (par exemple, ralentir aux cônes de circulation et aux virages serrés, s'arrêter aux barrières et à l'approche des panneaux d'avertissement, etc.).
« Notre étude prouve que des situations complexes, comme les zones de travail, obstacles inattendus, etc., peut être traité simplement en observant ce qu'un être humain ferait, puis en le reproduisant dans de nouveaux, situations similaires, " a déclaré Wirbel. " Cela signifie que tant que nous avons suffisamment de données de démonstration, nous pouvons gérer les cas d'utilisation que les conducteurs humains traiteraient raisonnablement. Cela pourrait être utilisé dans des situations d'interaction complexes en combinaison avec les approches plus classiques, pour rendre le véhicule capable de réagir de manière cohérente et intelligente."
Le système imaginé par Wirbel et ses collègues a obtenu des résultats très prometteurs et pourrait bientôt être appliqué aux véhicules autonomes, conduisant à un contrôle de vitesse plus efficace et à une conduite plus intuitive. Les chercheurs envisagent d'étendre leur preuve de concept à des situations plus complexes, apprendre à leur système à gérer une plus grande variété d'interactions avec d'autres véhicules sur la route, ainsi que l'ajout de manœuvres plus complexes, comme le changement de voie, tourner aux intersections, ou la navigation dans les ronds-points.
« Nous souhaitons également travailler sur l'explicabilité et la compatibilité du système avec les véhicules autonomes existants, expliquer à l'utilisateur final comment le réseau perçoit son environnement et pourquoi il prend ses décisions, " a ajouté Wirbel. " La feuille de route de la recherche est très large, C'est pourquoi nous participons et contribuons à de grandes conférences scientifiques pour rester au fait des derniers développements de pointe dans ce domaine. Notre rôle en tant qu'équipe R&D est également de fournir au reste de Valeo les bonnes clés et l'expertise pour rapprocher nos preuves de concept de la production."
© 2019 Réseau Science X