
Apparence HRP-5P (à gauche) et HRP-5P transportant env. Planche de 13 kg (à droite). Crédit :Science et technologie industrielles avancées
Des chercheurs ont développé un prototype de robot humanoïde, HRP-5P, destiné à effectuer de manière autonome des travaux lourds ou des travaux dans des environnements dangereux.
En 182 cm, Robot humanoïde de 101 kg, HRP-5P a été construit sur les technologies de la série HRP en incorporant de nouvelles technologies matérielles. Au sein de la série, il a des capacités physiques inégalées. Son intelligence robotique comprend la mesure de l'environnement et la reconnaissance d'objets, planification et contrôle des mouvements du corps entier, description des tâches et gestion de l'exécution, et des technologies de systématisation hautement fiables. Le logement de l'intelligence dans ce corps a permis l'installation autonome de plaques de plâtre par le robot, qui est un exemple typique de travail pénible sur les chantiers de construction. L'utilisation de HRP-5P, en tant que plateforme de développement, en collaboration entre l'industrie et le milieu universitaire promet d'accélérer la R&D vers l'application pratique de robots humanoïdes sur les chantiers de construction de bâtiments et dans l'assemblage de grandes structures telles que les avions et les navires.
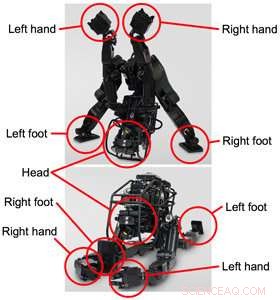
Figure 1. Penché en avant (en haut) et avec les jambes écartées en avant et en arrière (en bas). Crédit :Science et technologie industrielles avancées
La baisse du taux de natalité au Japon devrait entraîner de graves pénuries de main-d'œuvre dans la construction et de nombreuses autres industries. Il est impératif de résoudre ce problème en utilisant les technologies robotiques. Ces technologies offrent également une alternative intéressante à la présence de travailleurs de la construction sur les chantiers, installations aéronautiques, ou les chantiers navals effectuent des travaux lourds qui sont potentiellement dangereux. Cependant, il a été difficile de rendre ces chantiers de construction à grande échelle adaptés aux robots, qui a découragé l'introduction de robots. Parce que les robots humanoïdes ressemblent physiquement aux humains, ils peuvent fonctionner sans nécessiter de changements environnementaux, éventuellement soulager les travailleurs de travaux pénibles.
Dans le développement de la série HRP, AIST a collaboré avec plusieurs entreprises du secteur privé, dont Kawada Industries Inc. (maintenant Kawada Robotics Corp.), et a développé des technologies de base pour une application pratique. HRP-2 était capable de marcher bipède, allongé, debout, marcher sur des chemins étroits, et d'autres actions. HRP-3 pouvait marcher sur des surfaces glissantes et serrer des boulons sur des ponts à l'aide d'une télécommande. La recherche sur les robots humanoïdes d'intervention en cas de catastrophe en cours à l'AIST depuis 2011 a conduit à une version révisée de HRP-2 avec des capacités physiques améliorées (telles que la longueur des membres, amplitude de mouvement, et sortie conjointe), qui pourrait marcher sur un terrain accidenté, tourner les vannes, et effectuer d'autres tâches de manière semi-autonome sur la base de mesures environnementales en 3D. Cependant, ses capacités physiques étaient encore insuffisantes pour les travaux lourds tels que l'installation de plaques de plâtre, et il manquait un degré de liberté suffisant et une plage mobile suffisante d'articulations pour imiter le mouvement humain dans des environnements complexes. Vers cette fin, AIST a poursuivi le développement du robot humanoïde, HRP-5P, avec des capacités physiques lui permettant de se substituer aux personnes effectuant des travaux pénibles.
Par ailleurs, HRP-5P hérite des technologies de la série HRP et utilise la technologie brevetée de Honda Motor Co., Ltd.
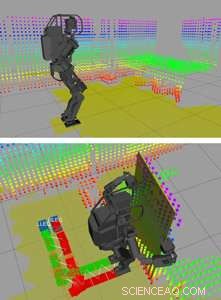
Figure 2. Carte des environs (en haut) et plan de marche (en bas). Crédit :Science et technologie industrielles avancées
Une partie du développement de HRP-5P a été soutenue par la R&D commandée par la New Energy and Industrial Technology Development Organization (NEDO), « R&D sur des systèmes de robots humanoïdes hautement fiables pouvant fonctionner dans des environnements non structurés » dans « robots humanoïdes autonomes (domaine des technologies de robot à éléments innovants) » de « R&D sur les technologies de robotique de base de nouvelle génération, " et une subvention pour la recherche scientifique de la Société japonaise pour la promotion de la science, "Cibler la planification des mouvements du corps entier basée sur l'acquisition de modèles environnementaux qui permet aux robots humanoïdes de s'adapter à des environnements inconnus" (numéro de projet de recherche JP17H07391).
Le prototype de robot humanoïde HRP-5P a été développé avec un corps robuste et une intelligence avancée pour fonctionner de manière autonome et fournir une source alternative de travail lourd.
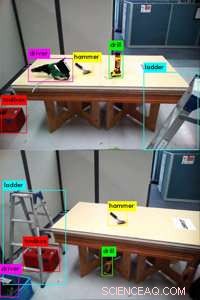
Figure 3. Exemple de détection d'objet. Crédit :Science et technologie industrielles avancées
Integration of these technologies has enabled autonomous gypsum board installation in which HRP-5P handles and carries large, heavy objects at a simulated residential construction site independently.
Spécifiquement, this work involves the following series of operations.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
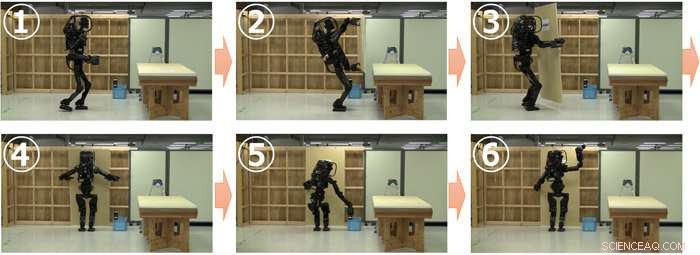
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology














