Un crash de l'une des technologies Uber, Les voitures autonomes de Inc. plus tôt cette année ont entraîné le premier décès de piéton associé à la technologie de conduite autonome. L'incident a mis en évidence les défis auxquels les entreprises technologiques sont confrontées dans le développement de logiciels capables de détecter et de répondre de manière adéquate aux dangers de la route et de ses environs immédiats. Le véhicule aurait pu s'arrêter complètement en trois secondes, mais n'a utilisé le freinage d'urgence que 1,3 seconde avant l'impact. Le freinage d'urgence aurait-il dû être l'action par défaut prise immédiatement après la détection d'un danger routier ?
Une nouvelle étude, « Comment les voitures autonomes doivent-elles conduire ? Une préférence pour les défauts dans les jugements moraux sous le risque et l'incertitude, " Publié dans Analyse des risques :une revue internationale a relevé ce défi en demandant au public ce qu'il croyait être le comportement le plus moral et le plus éthique pour un véhicule autonome (AV) face à une collision imminente. Même un AV parfaitement fonctionnel ne pourra pas éviter toutes les collisions et dans certaines situations, chaque option entraînera un certain type de plantage.
L'équipe de recherche, composé de Björn Meder, Nadine Fleischhut, et Nina-Carolin Krumnau du Max Planck Institute for Human Development et Michael R. Waldmann de l'Université de Göttingen, a répondu à cette question en demandant aux participants de choisir entre rester dans leur voie (et freiner), ou dévier, où chaque action pourrait conduire à une collision avec un autre usager de la route à divers degrés d'incertitude.
La principale conclusion de cette étude est que les gens préfèrent généralement que la voiture reste dans sa voie et effectue un arrêt d'urgence. Cela soutient l'idée que les gens considèrent l'option de séjour comme une valeur par défaut raisonnable, car il est conforme aux règles générales de conduite et offre une meilleure maniabilité, même si cela ne minimise pas la perte attendue. L'utilisation de cette action en tant que règle par défaut simple nécessite moins de traitement d'informations et conduira souvent à de meilleurs résultats. Les chercheurs ont également découvert que même si rester dans la voie entraînait un accident, les gens étaient moins susceptibles de modifier leur évaluation morale de l'action entreprise rétrospectivement, alors qu'un mauvais résultat a fortement influencé une analyse rétrospective d'une décision de dévier de la voie.
Dans leur première expérience, Les participants ont été confrontés à un scénario dans lequel un AV devait effectuer l'une des deux manœuvres suivantes :rester dans la voie ou faire un écart. Rester dans la voie met un piéton dans la rue en danger tandis que faire une embardée met en danger un passant sur le trottoir. La probabilité d'entrer en collision avec le piéton et le spectateur variait, créant différents scénarios avec des risques spécifiés ou inconnus. Les données ont été collectées auprès de 872 personnes en ligne via la plateforme Amazon Mechanical Turk (AMT). Les participants ont reçu une description écrite d'un scénario de circulation dans lequel une voiture roule sur une route lorsqu'un piéton apparaît soudainement sur son chemin. La voiture peut soit rester dans la voie et effectuer un arrêt d'urgence, auquel cas il pourrait entrer en collision avec le piéton, ou la voiture peut dévier vers la droite et effectuer un arrêt d'urgence, auquel cas il pourrait entrer en collision avec un passant sur le trottoir.
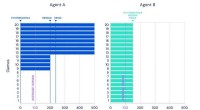
La probabilité d'entrer en collision avec le piéton dans la rue était de 20 %, 50 pour cent ou 80 pour cent. Dans la « condition à risque », la probabilité d'entrer en collision avec le spectateur était de 50 %. Dans la condition « d'incertitude », la probabilité était inconnue car les systèmes de la voiture étaient incapables de faire l'estimation. Les résultats ont montré une préférence générale pour rester dans la voie avec plus de 85 pour cent des sujets choisissant de rester dans la voie. Lorsque la probabilité d'entrer en collision avec le spectateur était inconnue, environ 70 pour cent des sujets préféraient encore rester dans la voie. Lorsque la probabilité d'entrer en collision avec le piéton était de 20 % et la probabilité d'entrer en collision avec le passant était de 50 %, personne n'a choisi de faire un écart. Même lorsque la probabilité des deux collisions était de 50 %, rester était considéré comme plus acceptable que dévier.
La deuxième expérience a examiné comment les gens évaluent rétrospectivement le comportement audiovisuel lorsqu'une collision s'est produite. D'un point de vue politique, Les VA devraient agir d'une manière que la société juge acceptable même si des collisions se produisent. Les chercheurs ont à nouveau recruté 766 sujets via la plateforme AMT. Il a été demandé aux participants comment un AV devrait fonctionner dans une situation spécifique et d'évaluer l'acceptabilité morale de rester et de s'écarter. Les résultats ont montré que si la voiture restait dans sa voie, le résultat de la situation (collision ou pas de collision avec un autre usager de la route) n'a pas affecté les jugements des participants sur la façon dont un VA devrait se comporter. Si la voiture a fait une embardée, cependant, le résultat a été très convaincant rétrospectivement. Si aucune collision ne s'est produite, environ 40 % ont préféré faire une embardée, mais moins de 20 pour cent avaient cette préférence lorsqu'une collision se produisait. Ainsi, même en cas de collision, rester dans la voie était considéré comme plus acceptable.
"Notre recherche souligne l'importance de mieux comprendre comment les gens pensent du comportement des véhicules autonomes sous différents degrés d'incertitude, " déclare Meder. " Les résultats aideront à éclairer l'élaboration des politiques et le débat public sur les implications éthiques des progrès technologiques qui transformeront la société de diverses manières. "
Globalement, il y a une préférence générale pour rester dans la voie et c'est une option par défaut moralement acceptable dans des situations de trafic critiques même si cela ne minimise pas la perte attendue. Cette simple valeur par défaut ne nécessite aucune information à collecter par les systèmes de l'AV sur les actions ou probabilités alternatives. Malgré ces constatations, les décideurs politiques sont confrontés au défi d'élaborer des politiques qui soient moralement saines, mais qui fassent également appel au désir d'auto-préservation du grand public. Études antérieures (Bonnefon, Chérif, &Rahwan, 2016, Science ) ont montré que les sujets manifesteraient une préférence pour les VA qui sacrifieraient leurs propres passagers afin de minimiser le nombre total de victimes, mais ils voulaient que leurs propres AV mettent l'accent sur la sécurité des passagers. Donc, alors que cette étude démontre une acceptabilité générale d'une action par défaut pour minimiser les pertes potentielles, Les propriétaires d'AV préféreraient des actions destinées à sauver les passagers du véhicule.