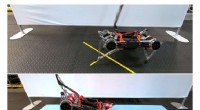
Le bras robotique souple comporte des unités modulaires interchangeables qui permettent au bras de fléchir et de tourner en réponse aux mouvements de la main d'un opérateur humain portant un gant équipé de capteurs souples sans fil. Crédit :David Gruber / Collège Baruch
Le bras humain peut effectuer un large éventail de mouvements extrêmement délicats et coordonnés, de tourner une clé dans une serrure à caresser doucement la fourrure d'un chiot. Les "bras" robotiques des sous-marins de recherche sous-marine, cependant, sont durs, saccadé, et manquent de finesse pour pouvoir atteindre et interagir avec des créatures comme des méduses ou des pieuvres sans les endommager. Précédemment, le Wyss Institute for Biologically Inspired Engineering de l'Université Harvard et ses collaborateurs ont développé une gamme de pinces robotiques souples pour gérer de manière plus sûre la vie marine délicate, mais ces dispositifs de préhension reposaient toujours sur du dur, bras sous-marins robotiques qui rendaient difficile leur manœuvre dans diverses positions dans l'eau.
Maintenant, un nouveau système construit par des scientifiques du Wyss Institute, John A. Paulson School of Engineering and Applied Sciences (SEAS) de Harvard, Collège Baruch, et l'Université de Rhode Island (URI) utilise un gant équipé de capteurs souples sans fil pour contrôler un module modulaire, "bras" robotique souple qui peut fléchir et se déplacer avec une dextérité sans précédent pour saisir et échantillonner la vie aquatique délicate. Ce système pourrait un jour permettre la création de laboratoires de recherche sous-marins où toutes les tâches délicates que les scientifiques effectuent dans un laboratoire terrestre pourraient être effectuées au fond de l'océan. Les enseignements de ce travail pourraient également avoir une valeur pour les applications de dispositifs médicaux. La recherche est publiée dans Rapports scientifiques .
"Ce nouveau bras robotique souple remplace le dur, bras rigides de série sur la plupart des submersibles, permettre à nos préhenseurs robotiques souples d'atteindre et d'interagir avec la vie marine avec beaucoup plus de facilité dans une variété d'environnements et nous permettant d'explorer des parties de l'océan qui sont actuellement sous-étudiées, " a déclaré le premier auteur Brennan Phillips, Doctorat., un professeur adjoint à l'URI qui était boursier postdoctoral au Wyss Institute et au SEAS à la fin de la recherche.
L'appareil mis au point par Phillips et ses collègues comporte une flexion, rotatif, et des modules de préhension qui peuvent être facilement ajoutés ou retirés pour permettre au bras d'effectuer différents types de mouvements en fonction de la tâche à accomplir - un avantage significatif, étant donné la diversité du terrain et de la vie dans l'océan. D'autres améliorations par rapport aux manipulateurs souples existants incluent un système de commande hydraulique compact et robuste pour un déploiement dans des environnements distants et difficiles. L'ensemble du système nécessite moins de la moitié de la puissance du plus petit bras manipulateur électronique sous-marin disponible dans le commerce, le rendant idéal pour une utilisation sur des véhicules sous-marins habités, qui ont une capacité de batterie limitée.
Le bras est contrôlé sans fil via un gant équipé de capteurs souples qui est porté par un scientifique, qui contrôle la flexion et la rotation du bras en déplaçant son poignet et les pinces en recourbant son index. Ces mouvements se traduisent par l'ouverture et la fermeture de diverses vannes du moteur hydraulique à eau de mer du système. Différents types de pinces souples peuvent être attachés à l'extrémité du bras pour lui permettre d'interagir avec des créatures de forme variable, Taille, et délicatesse, de dur, coraux cassants à mous, méduse diaphane.
« Les bras robotiques sous-marins actuellement disponibles fonctionnent bien pour l'exploration pétrolière et gazière, mais pas pour manipuler la vie marine délicate - les utiliser, c'est comme essayer de ramasser une serviette avec une pince de crabe en métal, " a déclaré le co-auteur David Gruber, Doctorat., qui est professeur de biologie au Baruch College, CUNY et un explorateur National Geographic. "Le système de contrôle des gants nous permet d'avoir un contrôle beaucoup plus intuitif sur le bras robotique souple, comme la façon dont nous bougerions nos propres bras pendant la plongée sous-marine."

Les auteurs de l'article Brennan Phillips (à gauche) et David Gruber (à droite) pilotent un sous-marin de recherche habité en haute mer. Leurs bras robotiques souples pourraient un jour permettre aux biologistes marins de mener des expériences dans des laboratoires de recherche sous-marine basés sur des sous-marins. Crédit :Brennan Phillips
Le bras robotique et le système de préhension ont été testés sur le terrain à partir d'un sous-marin de 3 personnes dans les écosystèmes des grands fonds inexplorés de l'archipel Fernando de Noronha, Brésil. Il a réussi à interagir avec ou à collecter des organismes délicats des eaux moyennes et profondes comme une éponge de verre, un concombre de mer, un corail ramifié, et tuniciers bioluminescents flottant librement. Différents modules ont été rapidement et facilement intervertis dans le bras afin de mieux manœuvrer les pinces pour atteindre son organisme cible, ou en cas d'endommagement d'un module, sans avoir besoin de démonter tout le bras.
« Cette faible puissance, le robot mou contrôlé par des gants a été conçu pour le futur biologiste marin, qui sera capable de conduire la science bien au-delà des limites de SCUBA et avec des moyens comparables ou meilleurs qu'un via un plongeur humain, " dit Robert Wood, Doctorat., un auteur principal de l'article qui est membre fondateur du corps professoral du Wyss Institute ainsi que professeur Charles River d'ingénierie et de sciences appliquées à SEAS.
Les chercheurs continuent d'affiner leurs conceptions et intègrent des capacités d'échantillonnage non invasif d'ADN et d'ARN dans les unités d'actionnement du système de bras, dans le but de pouvoir capturer la vie marine fragile, effectuer une série d'expériences dans un "laboratoire sous-marin, " et les relâcher sains et saufs.
"L'objectif du Wyss Institute est de faire sortir les découvertes scientifiques du laboratoire et dans le monde, mais parfois, nous devons trouver comment modifier le laboratoire scientifique lui-même afin qu'il puisse être retiré du milieu universitaire afin de pouvoir sonder les environnements du monde réel. Cette recherche marque le début de cette possibilité pour les grands fonds, et les avancées qu'ils décrivent pourraient avoir une valeur beaucoup plus large, même pour des applications médicales et chirurgicales, " a déclaré Donald Ingber, MARYLAND., Doctorat., le directeur fondateur du Wyss Institute qui est également le professeur Judah Folkman de biologie vasculaire au HMS et le programme de biologie vasculaire du Boston Children's Hospital, et professeur de bio-ingénierie à SEAS.