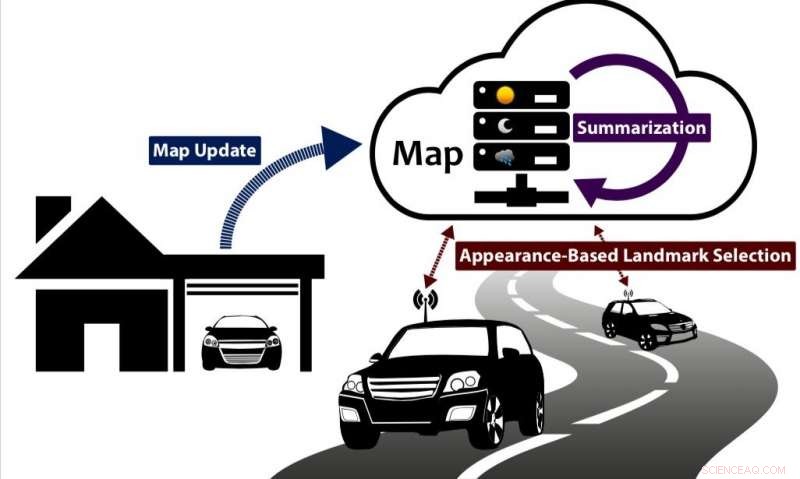
Un aperçu schématique de notre système de localisation visuelle et de cartographie « complet ». Crédit :Bürki et al.
Des chercheurs du laboratoire de systèmes autonomes de l'ETH Zürich ont récemment développé un processus de gestion de cartes pour les systèmes de localisation visuelle, spécialement conçu pour les opérations dans des environnements extérieurs impliquant plusieurs véhicules. Leur étude, présenté au Symposium sur les véhicules intelligents (IV) de cette année et disponible sur arXiv, relève le défi clé d'incorporer de grandes quantités de données de localisation visuelle dans une carte visuelle permanente, afin d'assurer une localisation efficace dans toutes les conditions d'apparence.
"L'auto-localisation est cruciale pour tout type de robot mobile, y compris les véhicules autonomes, " Mathias Bürki, l'un des chercheurs qui a mené l'étude, a déclaré Tech Xplore. "Alors que la plupart des véhicules de recherche autonomes sont équipés de capteurs LiDAR 3D, ceux-ci sont encore chers, et leur aptitude à la production de masse future est donc discutable. D'autre part, les capteurs de caméra sont très bon marché, et ont déjà fait leur entrée dans les flottes automobiles actuelles (par exemple pour les systèmes d'aide au stationnement). Par conséquent, nous avons étudié le potentiel d'utiliser des caméras comme capteur principal pour une localisation précise des véhicules autonomes."
L'un des principaux défis rencontrés lors du développement de systèmes de localisation visuelle pour les environnements extérieurs est de s'assurer que ces systèmes résistent bien aux changements d'apparence. Ceux-ci incluent à la fois les changements se produisant à court terme (par exemple, l'éclairage, ombres, etc.) et à long terme (par exemple, changements saisonniers, feuillage, etc.).
Des recherches antérieures ont montré que les cartes créées pour la localisation visuelle pouvaient théoriquement être adaptées pour fonctionner dans diverses conditions d'apparence extérieure. Néanmoins, adapter ces cartes peut coûter très cher, nécessitant des ressources substantielles consacrées aux serveurs de maintenance des cartes et aux véhicules autonomes eux-mêmes. Bien qu'il existe un certain nombre de solutions qui pourraient aider à réduire les coûts et à résoudre la complexité de ce problème, jusque là, ceux-ci n'ont été étudiés qu'isolément.
"L'objectif de nos recherches récentes était de combiner différents composants et approches qui améliorent l'évolutivité, tels que le résumé de carte hors ligne, et sélection de points de repère en ligne basée sur l'apparence, afin de créer un système de localisation et de cartographie totalement évolutif et économe en ressources, " explique Bürki. " Nous voulions également étudier en détail dans quelle mesure ce système fonctionne dans le monde réel, conditions à long terme, combien de temps il faut pour que les cartes visuelles convergent vers un état stable, dans quelle mesure les différents composants traitant de l'évolutivité fonctionnent ensemble, et si l'un interfère avec l'autre d'une manière indésirable."
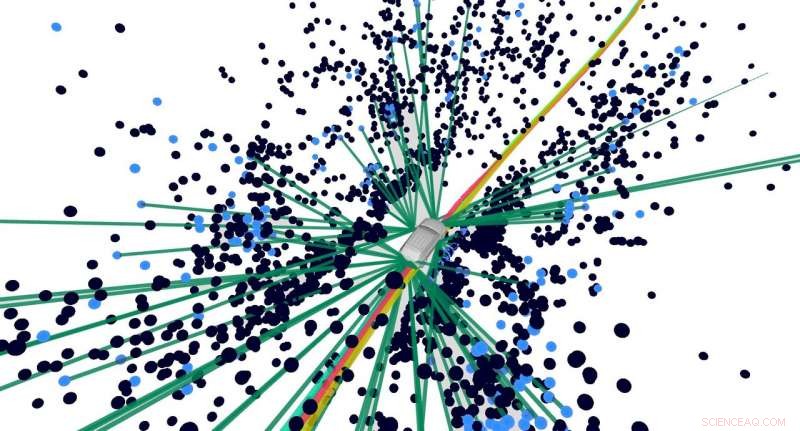
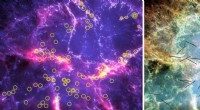
Une capture d'écran du système de localisation visuelle des chercheurs. Les sphères bleu foncé et bleu clair indiquent la position 3D des repères visuels utilisés pour la localisation. Le bleu clair indique ceux qui sont sélectionnés par la sélection de points de repère basée sur l'apparence, tandis que les plus sombres sont ceux qui sont rejetés. Les lignes verdâtres indiquent les correspondances entre les images de la caméra en direct dans la voiture (de l'avant, la gauche-, caméra arrière et droite), et les repères 3D sur la carte. A travers ces matchs, l'emplacement (position, orientation) de la voiture est déduit. Les lignes colorées épaisses illustrent les trajectoires où la voiture roulait lors de l'enregistrement des jeux de données qui ont été utilisés pour construire la carte multi-sessions. Crédit :Bürki et al.
Le processus de gestion de carte développé par Bürki et ses collègues fonctionne en ajoutant de nouveaux ensembles de données à la carte au fil du temps, le mettant à jour en permanence pour mieux faire face aux nouvelles conditions d'apparence. Chaque fois qu'un nouveau jeu de données est ajouté à la carte, une étape ultérieure de récapitulation de la carte permet de s'assurer que sa taille ne dépasse pas une certaine limite.
"Si le nouveau jeu de données a été enregistré dans des conditions d'apparence déjà bien couvertes par la carte, le jeu de données n'est pas ajouté à la carte, mais les statistiques sur les observations de points de repère sont améliorées, qui en retour rend la sélection de points de repère basée sur l'apparence dans les sorties futures plus efficace, " explique Burki.
Les chercheurs ont testé le nouveau processus de gestion des cartes dans le monde réel dans des conditions extérieures difficiles. Les résultats de leurs évaluations étaient très prometteurs, suggérant que leur mécanisme de gestion de carte léger pourrait aider à développer des systèmes de localisation visuelle pour les véhicules autonomes qui fonctionnent bien dans différentes conditions d'apparence, tout en étant plus performant dans la sélection des points de repère.
"Notre conclusion la plus significative était qu'il est en effet possible et pratiquement faisable de construire un tel système de localisation visuelle et de cartographie qui a) est, et reste efficace, b) est, et reste évolutif, et c) fournit une localisation précise dans les environnements extérieurs à long terme, " a déclaré Bürki. " Une autre conclusion est que la sélection de points de repère en ligne basée sur l'apparence et le résumé de carte hors ligne fonctionnent bien ensemble et se complètent. "
Dans le futur, les véhicules autonomes les plus performants seront très probablement équipés de capteurs LiDAR 3D, ceux-ci apparaissant aujourd'hui indispensables pour garantir la sécurité et faire en sorte que le véhicule perçoive efficacement les obstacles dans son environnement, y compris les piétons. Récemment, le coût de ces capteurs a considérablement diminué, ce qui pourrait également faciliter leur adoption généralisée dans les années à venir.
« Nous allons maintenant concentrer davantage nos recherches sur la question de savoir comment les capteurs LiDAR peuvent être utilisés pour prendre en charge la localisation visuelle, " a déclaré Bürki. "Surtout dans de mauvaises conditions d'éclairage, les caméras atteignent inévitablement leurs limites, tandis que les LiDAR sont également bien adaptés aux conditions sombres."
© 2018 Tech Xplore