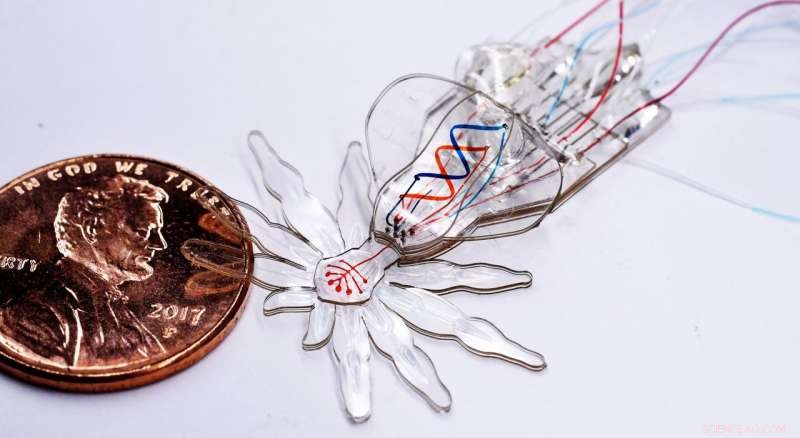
Un nouveau processus de fabrication permet la création de robots souples à l'échelle millimétrique avec des caractéristiques à l'échelle micrométrique, comme illustré ici avec l'exemple d'une petite araignée paon robotique souple avec des parties du corps en mouvement et des yeux et des abdomens colorés. Crédit :Institut Wyss de l'Université Harvard
Les roboticiens envisagent un avenir dans lequel le soft, les robots inspirés des animaux peuvent être déployés en toute sécurité dans des environnements difficiles d'accès, comme à l'intérieur du corps humain ou dans des espaces trop dangereux pour le travail des humains, dans lequel les robots rigides ne peuvent actuellement pas être utilisés. Des robots mous de la taille d'un centimètre ont été créés, mais jusqu'à présent, il n'a pas été possible de fabriquer des robots flexibles multifonctionnels capables de se déplacer et de fonctionner à des échelles plus petites.
Une équipe de chercheurs du Wyss Institute for Biologically Inspired Engineering de Harvard, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), et l'Université de Boston a maintenant surmonté ce défi en développant un processus de fabrication intégré qui permet la conception de robots souples à l'échelle millimétrique avec des fonctionnalités à l'échelle micrométrique. Pour démontrer les capacités de leur nouvelle technologie, ils ont créé une araignée robotique douce - inspirée de l'araignée paon australienne colorée de la taille d'un millimètre - à partir d'un seul matériau élastique avec une mise en forme du corps, mouvement, et les caractéristiques de couleur. L'étude est publiée dans Matériaux avancés .
"Les plus petits systèmes robotiques souples ont encore tendance à être très simples, avec généralement un seul degré de liberté, ce qui signifie qu'ils ne peuvent actionner qu'un seul changement de forme ou de type de mouvement, " a déclaré Sheila Russo, Doctorat., co-auteur de l'étude. Russo a aidé à lancer le projet en tant que boursier postdoctoral dans le groupe de Robert Wood au Wyss Institute et au SEAS et est maintenant professeur adjoint à l'Université de Boston. « En développant une nouvelle technologie hybride qui fusionne trois techniques de fabrication différentes, nous avons créé une araignée robotique souple faite uniquement de caoutchouc de silicone avec 18 degrés de liberté, englobant les changements de structure, mouvement, et couleur, et avec de minuscules caractéristiques de l'ordre du micromètre."
Bois, Doctorat., est membre principal du corps professoral et co-responsable de la plateforme Bioinspired Soft Robotics à l'Institut Wyss et professeur Charles River d'ingénierie et de sciences appliquées à SEAS. "Dans le domaine des dispositifs robotiques mous, cette nouvelle approche de fabrication peut ouvrir la voie à des niveaux de complexité et de fonctionnalité similaires à ceux présentés par leurs homologues rigides à cette petite échelle. À l'avenir, cela peut également nous aider à émuler et à comprendre les relations structure-fonction chez les petits animaux bien mieux que les robots rigides, " il a dit.
Dans leur Origami microfluidique pour dispositifs pneumatiques/hydrauliques reconfigurables (MORPH), l'équipe a d'abord utilisé une technique de lithographie douce pour générer 12 couches d'un silicone élastique qui, ensemble, constituent la base matérielle de l'araignée molle. Chaque couche est découpée avec précision dans un moule avec une technique de micro-usinage laser, puis collé à celui ci-dessous pour créer la structure 3D rugueuse de l'araignée molle.
La clé pour transformer cette structure intermédiaire en conception finale est un réseau préconçu de canaux microfluidiques creux qui est intégré dans des couches individuelles. Avec une troisième technique connue sous le nom d'auto-pliage induit par injection, pressurisé un ensemble de ces canaux microfluidiques intégrés avec une résine durcissable de l'extérieur. Cela induit des couches individuelles, et avec eux aussi leurs couches voisines, se plier localement dans leur configuration finale, qui se fixe dans l'espace lorsque la résine durcit. Par ici, par exemple, l'abdomen gonflé de l'araignée douce et ses pattes incurvées vers le bas deviennent des caractéristiques permanentes.
"Nous pouvons contrôler avec précision ce processus de pliage semblable à un origami en faisant varier l'épaisseur et la consistance relative du matériau silicone adjacent aux canaux à travers différentes couches ou par découpe au laser à différentes distances des canaux. Pendant la pressurisation, les canaux fonctionnent alors comme des actionneurs qui induisent un changement structurel permanent, " a déclaré le premier auteur et correspondant Tommaso Ranzani, Doctorat., qui a commencé l'étude en tant que boursier postdoctoral dans le groupe de Wood et est maintenant également professeur adjoint à l'Université de Boston.
L'ensemble restant de canaux microfluidiques intégrés a été utilisé comme actionneurs supplémentaires pour colorer les yeux et simuler les motifs de couleur abdominale des espèces d'araignées paon en faisant couler des fluides colorés ; et pour induire des mouvements semblables à ceux de la marche dans les structures des jambes. « Ce premier système MORPH a été fabriqué en un seul, processus monolithique qui peut être réalisé en quelques jours et facilement itératif dans les efforts d'optimisation de la conception, " dit Ranzani.
"L'approche MORPH pourrait ouvrir le domaine de la robotique douce aux chercheurs qui se concentrent davantage sur les applications médicales où les tailles plus petites et la flexibilité de ces robots pourraient permettre une toute nouvelle approche de l'endoscopie et de la microchirurgie, " a déclaré le directeur fondateur du Wyss Institute, Donald Ingber, MARYLAND., doctorat